Computer Graphics: Camera
카메라 (Camera)
- 이 보고서는 물리적 세계와 컴퓨터 그래픽스 영역 모두에서 카메라 작동의 기본 원칙을 설명합니다.
- 빛의 수렴과 초점 맞추기부터 디포커스 블러(defocus blur) 및 안티앨리어싱(anti-aliasing)과 같은 시각 효과 구현에 이르는 개념을 다룹니다.
카메라 기본 축 구성 (Constructing the Camera’s Basis Axes)
- 3D 그래픽스에서 카메라의 로컬 좌표계는 세 개의 직교 기본 벡터로 정의됩니다.
- 이 벡터들은 월드 공간에서 카메라의 방향과 일치하도록 구성되어, 3D 물체를 2D 뷰포트(viewport)에 올바르게 투영할 수 있게 합니다.
- 이 과정은 세 가지 핵심 매개변수에 의존합니다:
- 카메라의 위치 (lookfrom)
- 카메라가 조준하는 지점 (lookat)
- 월드 공간의 up vector (상향 벡터)
카메라 로컬 축 정의 (Defining the Camera’s Local Axes)
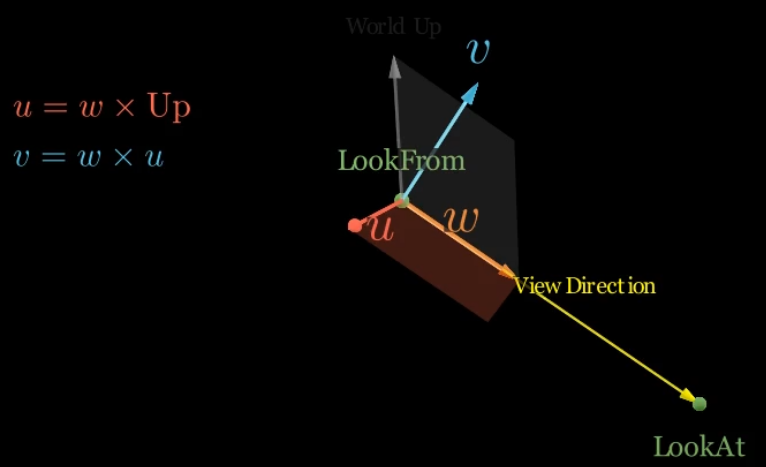
- 카메라의 로컬 축(일반적으로 u-v-w 기본 축 또는 오른쪽-위-뷰(right-up-view) 기본 축이라고 함)은 벡터 연산을 사용하여 계산할 수 있습니다:
- 뷰 방향 (w-축)
- 첫 번째 축은 카메라의 뷰 방향입니다.
- 이는
lookfrom위치에서lookat지점을 향하는 벡터입니다.
- 이는
- 적절한 기본 벡터를 형성하려면 정규화되어야 합니다.
- $w=\text{unit_vector}(\text{lookfrom}−\text{lookat})$
- 벡터는
lookfrom - lookat으로 정의되어 w-축이 장면에서 멀어지는 방향을 가리키도록 보장하며, 이는 컴퓨터 그래픽스에서 자주 사용되는 왼손 좌표계의 표준 관례입니다.
- 첫 번째 축은 카메라의 뷰 방향입니다.
- 오른쪽 벡터 (u-축)
- 두 번째 축, 즉 “오른쪽” 벡터는 뷰 방향과 월드 공간의 상향 벡터 모두에 수직입니다.
- 이는 외적(cross product)을 사용하여 계산됩니다.
- 월드 공간의 상향 벡터는 일반적으로 $(0,1,0)$이지만, 계산에 이 벡터의 정규화된 버전을 사용하는 것이 중요합니다.
- $u=\text{unit_vector}(\text{up_vector}\times w)$
- 두 번째 축, 즉 “오른쪽” 벡터는 뷰 방향과 월드 공간의 상향 벡터 모두에 수직입니다.
- 보정된 상향 벡터 (v-축)
- 세 번째 축은 카메라 로컬 공간의 “상향” 벡터입니다.
- 이는 뷰 방향과 오른쪽 벡터 모두에 완벽하게 직교해야 합니다.
- 초기 상향 벡터가 제공되지만, 이 직교성을 보장하기 위해 새롭고 보정된 상향 벡터가 생성됩니다.
- 이 역시 외적을 사용하여 계산됩니다.
- $v=w\times u$
- 외적에서 벡터의 순서는 오른손 또는 왼손 좌표계에 매우 중요합니다.
- 위에 표시된 순서는 $u$의 초기 유도에 사용된 왼손 시스템과 일치합니다.
- 위에 표시된 순서는 $u$의 초기 유도에 사용된 왼손 시스템과 일치합니다.
- 세 번째 축은 카메라 로컬 공간의 “상향” 벡터입니다.
- 뷰 방향 (w-축)
정규화의 중요성 (The Importance of Normalization)
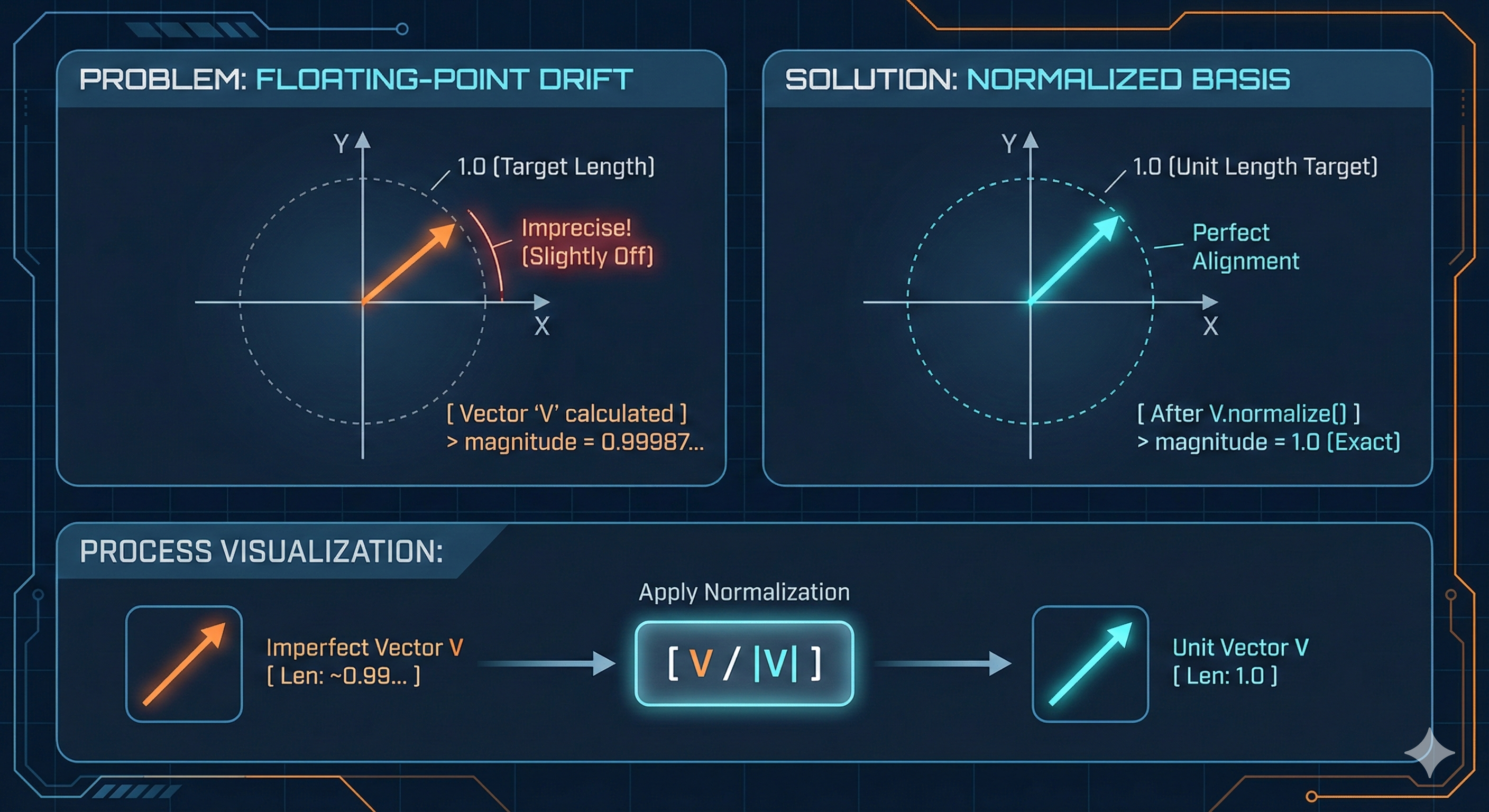
- 두 개의 직교 단위 벡터의 외적은 이론적으로 다른 단위 벡터를 생성하지만, 실제로는 항상 그런 것은 아닙니다.
- 부동 소수점 산술의 한계로 인해 계산된 크기가
1에서 약간 벗어날 수 있습니다.
- 부동 소수점 산술의 한계로 인해 계산된 크기가
- 따라서 각 외적 연산 후에 결과 벡터를 정규화하는 것은 표준적이며 필수적인 관행입니다.
lookfrom및lookat지점이 방향을 정의하지만, 빼기와 외적 연산에서 발생하는 결과 벡터의 크기는 다양할 수 있습니다.- 정규화는 각 기본 벡터가 단위 길이를 갖도록 보장하며, 이는 일관되고 안정적인 좌표계의 기본 요구 사항입니다.
-
이 과정은 반복되는 벡터 계산에서 축적될 수 있는 정밀도 오류를 완화하는 데 중요합니다.
카메라가 이미지를 형성하는 방식 (How a Camera Forms an Image)
이미지 포인트와 이미지 평면 (Image Point and Image Plane)
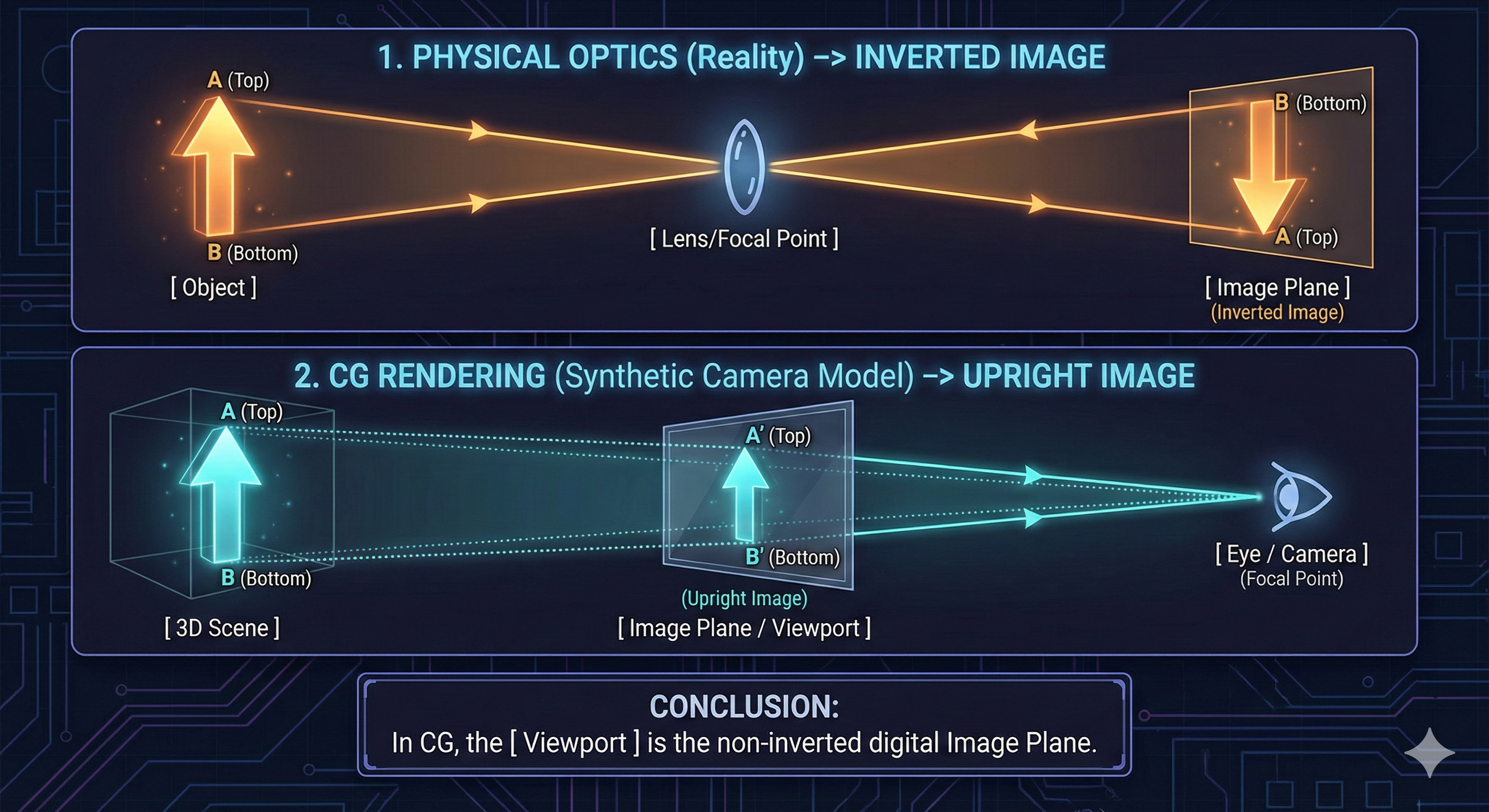
- 카메라는 물체에서 오는 광선을 센서에 수렴시켜 이미지를 형성합니다.
- 물체는 여러 방향으로 빛을 반사하지만, 카메라 렌즈는 이 광선들을 이미지 평면(Image Plane)이라고 알려진 2D 표면의 단일 지점, 즉 이미지 포인트(Image Point)로 초점을 맞춥니다.
- 총체적으로 이 지점들은 센서에 반전된 이미지를 형성합니다.
- 컴퓨터 그래픽스에서 뷰포트(viewport)는 3D 장면이 렌더링되는 화면의 2D 창입니다.
- 이는 최종 렌더링된 이미지를 나타내며, 물리적 이미지 평면의 디지털 등가물로 간주될 수 있습니다.
착란원 (Circle of Confusion, CoC)
- 물체 위의 한 지점에서 나온 광선이 이미지 평면에 완벽하게 수렴하지 않을 때, 그 광선은 단일 지점 대신 작은 원을 형성합니다.
- 이를 착란원(Circle of Confusion, CoC)이라고 합니다.
- 착란원의 크기는 최종 이미지에서 물체의 선명도를 직접적으로 결정합니다.
- 착란원이 작을수록 이미지가 더 선명하고 초점이 잘 맞습니다.
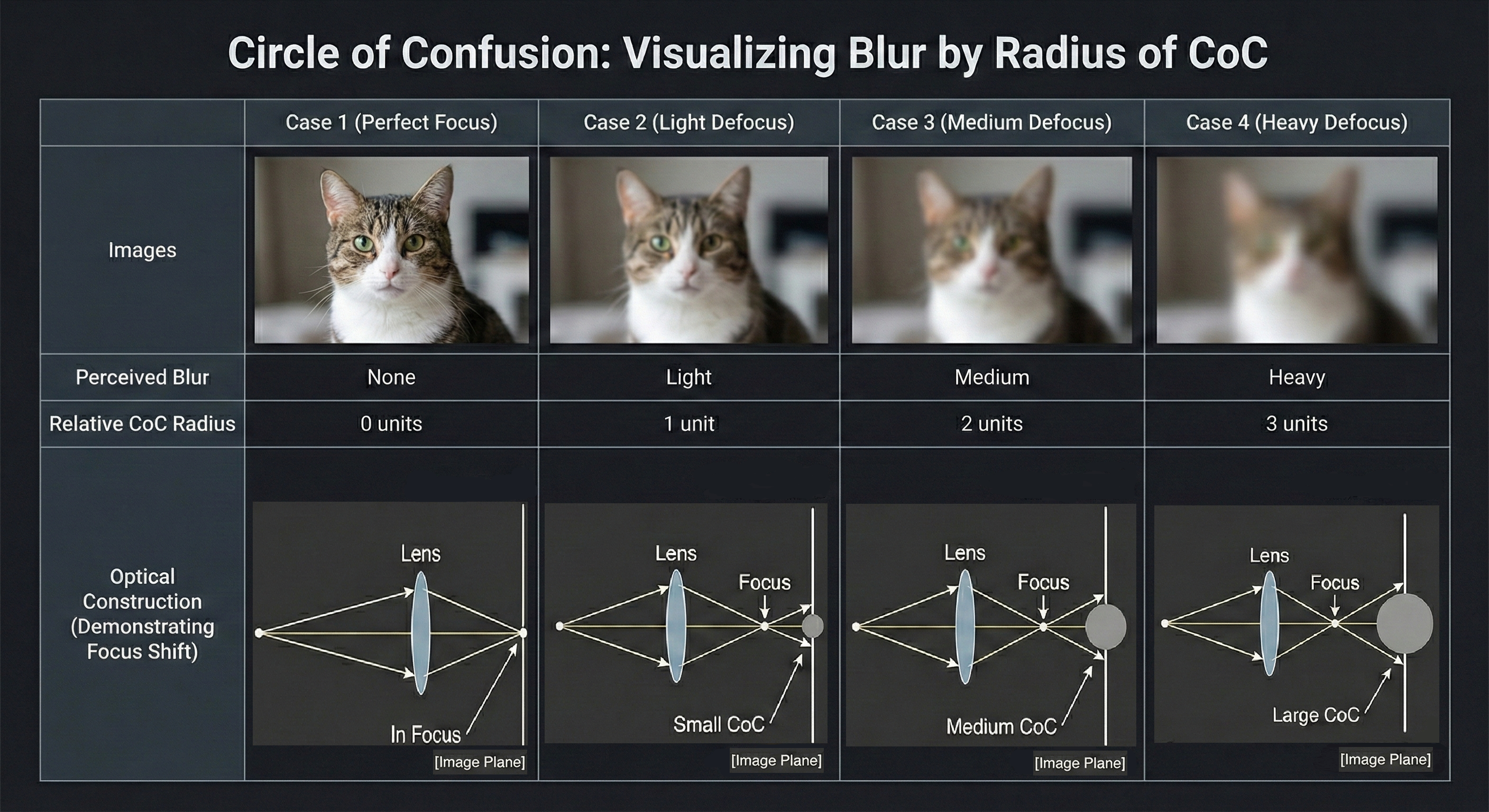
- 렌즈를 조정함으로써 사진가는 다양한 거리에 있는 물체에 대한 착란원의 크기를 제어하여 초점을 맞출 수 있습니다.
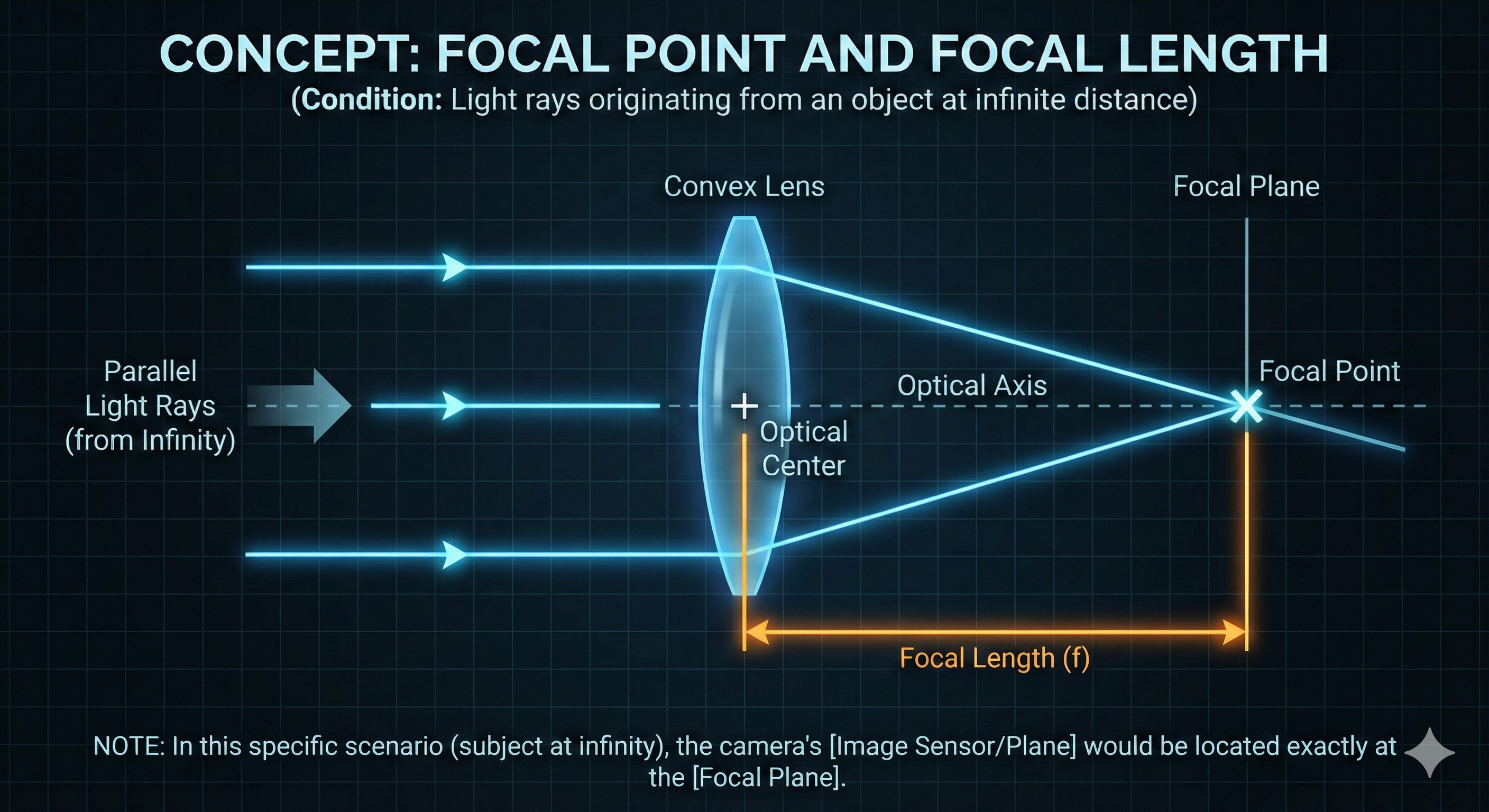
초점과 초점 거리 (Focal Point and Focal Length)
- 초점(Focal Point)과 초점면(Focal Plane)의 개념은 광선이 사실상 평행한 무한 거리의 물체에서 발생하는 광선에 고유합니다.
- 이 시나리오에서 모든 평행 광선은 초점면의 단일 지점인 초점(Focal Point)으로 수렴합니다.
- 초점 거리(Focal Length)는 렌즈의 광학 중심과 주 초점 사이의 거리입니다.
- 실제 카메라의 경우, 피사체가 무한 거리에 있으면 이미지 평면은 초점면과 같은 위치에 있습니다.
- 따라서 초점 거리는 렌즈의 광학 중심에서 이미지 센서까지의 거리로 간주될 수 있습니다.
- 실제 카메라의 경우, 피사체가 무한 거리에 있으면 이미지 평면은 초점면과 같은 위치에 있습니다.
- 렌즈는 단일 초점 거리(고정 초점 거리)를 가진 단 렌즈(prime) 또는 가변 초점 거리를 가진 줌 렌즈(zoom)로 분류됩니다.
- 줌 렌즈는 내부 요소를 움직여 초점 거리를 변경하며, 이는 시야를 변경합니다.
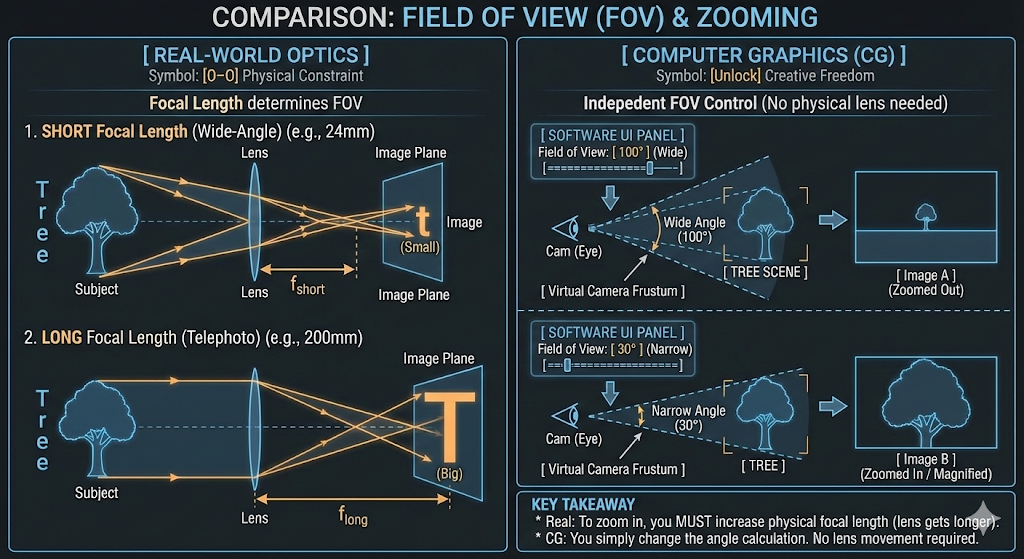
시야와 줌 (Field of View and Zooming)
- 시야(Field of View, FOV)는 주어진 순간에 볼 수 있는 관찰 가능한 세계의 범위입니다.
- 사진 및 컴퓨터 그래픽스에서 이는 카메라가 장면을 얼마나 많이 포착할 수 있는지를 결정하는 각도이며, 본질적으로 원근감과 줌 수준을 제어합니다.
- 실제 세계에서 카메라의 시야는 초점 거리와 본질적으로 연결되어 있습니다.
- 고정된 초점 거리(예: 50mm 렌즈)를 가진 특정 렌즈는 특정하고 협상 불가능한 시야를 갖습니다.
- 초점 거리가 길수록(망원 렌즈) 시야가 좁아져 장면을 확대하고 “줌 인” 효과를 생성합니다.
- 반대로, 초점 거리가 짧을수록(광각 렌즈) 시야가 넓어지고 장면을 더 많이 포착하여 “줌 아웃” 효과를 생성합니다.
- 고정된 초점 거리(예: 50mm 렌즈)를 가진 특정 렌즈는 특정하고 협상 불가능한 시야를 갖습니다.
- 실제 카메라와 달리,
- 컴퓨터 그래픽스 엔진은 물리적으로 정확하지는 않지만 더 큰 창의적 제어를 위해 초점 거리와 독립적으로 시야를 설정할 수 있도록 허용하는 경우가 많습니다.
조리개 (Aperture)
- 광학 시스템에서 조리개(aperture)는 렌즈로 들어오는 빛의 양을 제어하는 구멍입니다.
- 조리개가 클수록 더 넓은 범위의 각도에서 빛이 들어올 수 있으므로, 렌즈가 이 광선들을 단일 초점에 수렴시키기가 더 어려워집니다.
- 이로 인해 정확한 초점 거리에 있는 물체는 선명한 이미지를 형성하는 반면, 다른 거리에 있는 물체는 더 큰 착란원(CoC)으로 인해 점진적으로 더 흐릿하게 보입니다.
-
조리개의 크기는 일반적으로 f-수(f-number, N) 또는 f-스톱으로 표시되며, 이는 렌즈의 초점 거리($f$)와 유효 조리개 직경($D$)의 비율로 계산됩니다.
\[N={f\over D}\] -
고정 초점 거리 렌즈(즉, 줌이 없는 렌즈)의 경우 f-수는 조리개 직경에 반비례합니다.
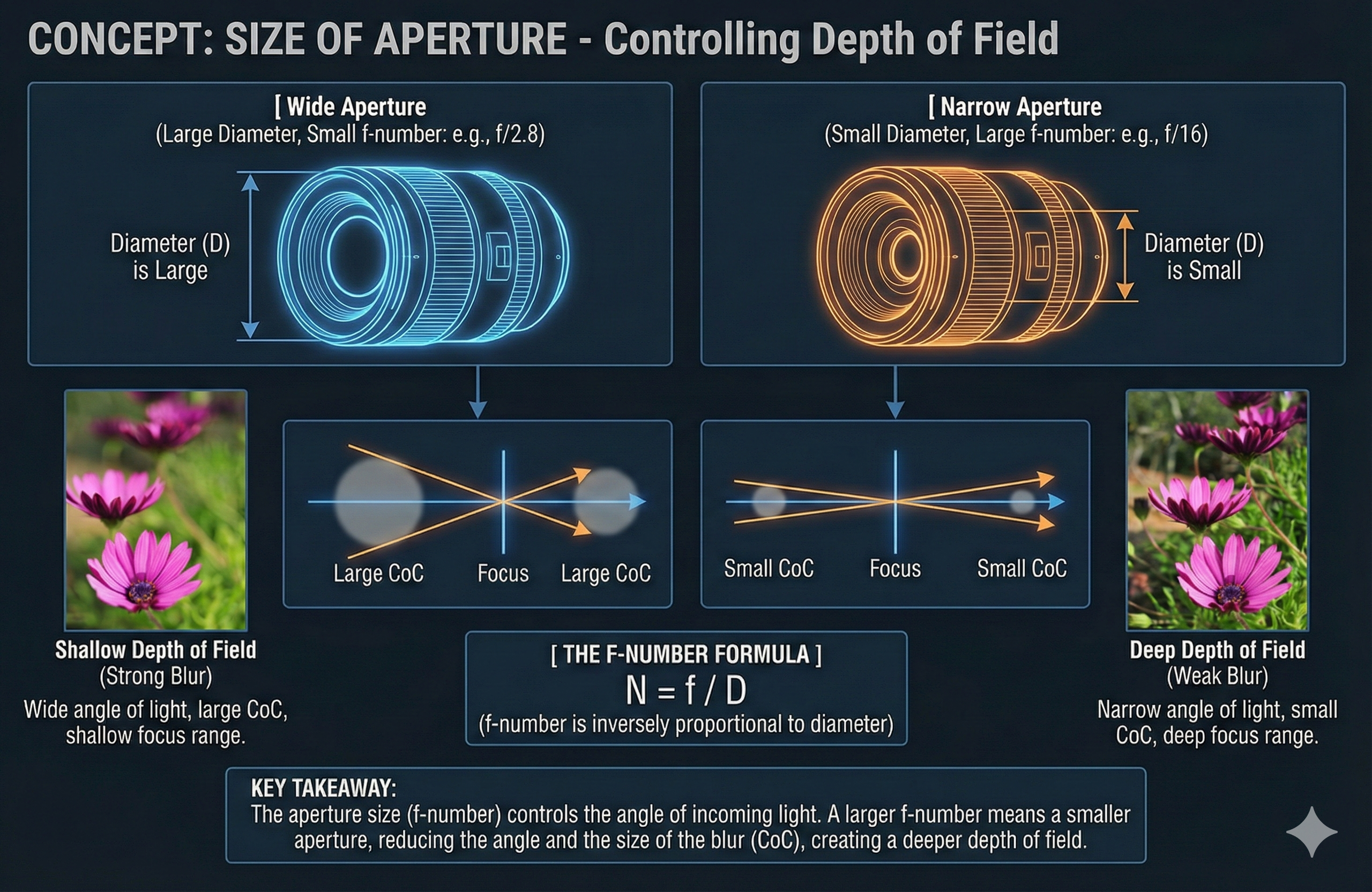
- 조리개는 f-수를 통해 이 평면 밖에 있는 물체의 흐림 정도를 결정합니다.
- f-수가 증가하면 조리개 직경이 감소합니다.
- 이는 렌즈로 들어오는 광선 각도를 줄여 착란원을 축소시킵니다.
- 결과적으로 초점 거리 이외의 거리에 있는 물체는 덜 흐릿하게 보입니다.
- 반대로, f-수가 감소하면 조리개 직경이 증가합니다.
- 이는 입사광의 각도를 넓혀 착란원을 확장하고 초점 거리 밖에 있는 물체가 더 흐릿하게 보이게 합니다.
- f-수가 증가하면 조리개 직경이 감소합니다.
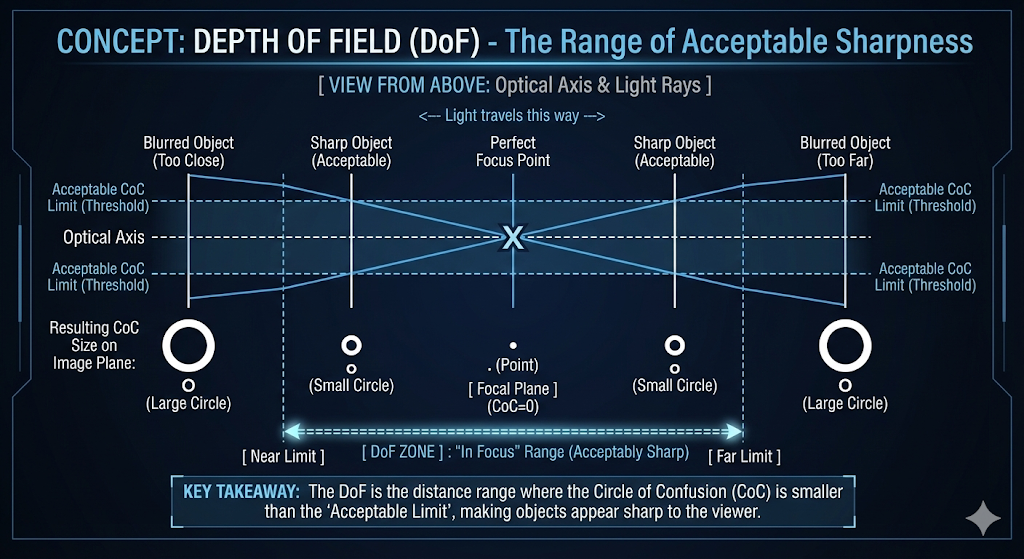
피사계 심도 (Depth of Field)
- 피사계 심도(depth of field, DoF)는 이미지에서 허용 가능한 정도로 선명하게 보이는 장면 내 거리의 범위입니다.
- 물체가 “초점이 맞았다”고 간주되는 것은 이미지 평면에 반사된 광선으로 형성된 착란원(CoC)이 시청자가 단일 지점으로 인식할 수 있을 만큼 충분히 작을 때입니다.
- 착란원의 크기는 물체가 초점면으로부터 얼마나 떨어져 있는지에 따라 달라집니다.
- 피사계 심도가 넓다는 것은 더 넓은 범위의 거리가 초점이 맞은 것처럼 보인다는 의미입니다.
- 이는 초점면에서 상당히 멀리 떨어진 물체라도 DoF 경계 내에 남아 있는 한 허용 가능한 정도로 선명하게 보일 수 있음을 시사합니다.
초점 맞추기 (Focusing)
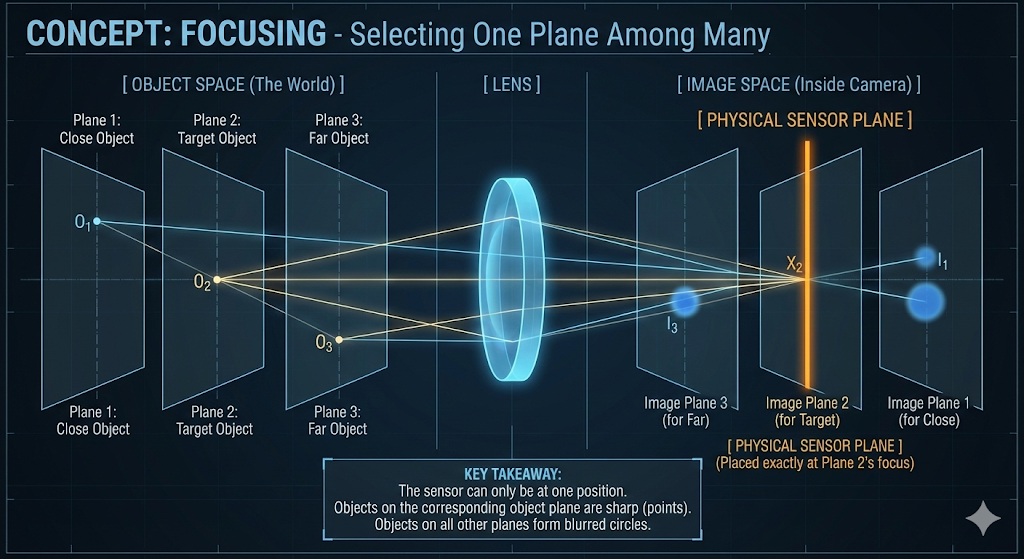
- 카메라가 장면을 포착할 때, 모든 물체는 카메라로부터 특정 깊이 또는 거리에 존재합니다.
- 세계가 카메라의 뷰 방향에 수직인 수많은 평행한 물체 평면(object planes)으로 구성되어 있다고 생각해 보십시오.
- 이상적으로는 단일 물체 평면의 지점에서 발생하는 광선이 카메라 내의 단일 해당 이미지 평면(image plane)으로 수렴될 것입니다.
- 이는 각 물체 평면이 광선이 완벽하게 초점이 맞춰지는 자체의 고유한 이미지 평면을 가지고 있음을 의미합니다.
- 그러나 카메라의 센서는 주어진 순간에 단 하나의 고정된 이미지 평면만 차지할 수 있습니다.
- 이 평면이 렌더링을 위해 선택되면, 다른 모든 평면의 물체에서 오는 광선은 선명하게 초점이 맞지 않을 것입니다.
- 이 광선들은 단일 지점으로 수렴하는 대신, 선택된 이미지 평면과 착란원(CoC)이라고 알려진 흐릿한 원반으로 교차할 것입니다.
- 이 원의 크기가 해당 특정 지점의 흐림 정도를 결정합니다.
이미지 평면을 선택하는 방법 (How to Choose the Image Plane)
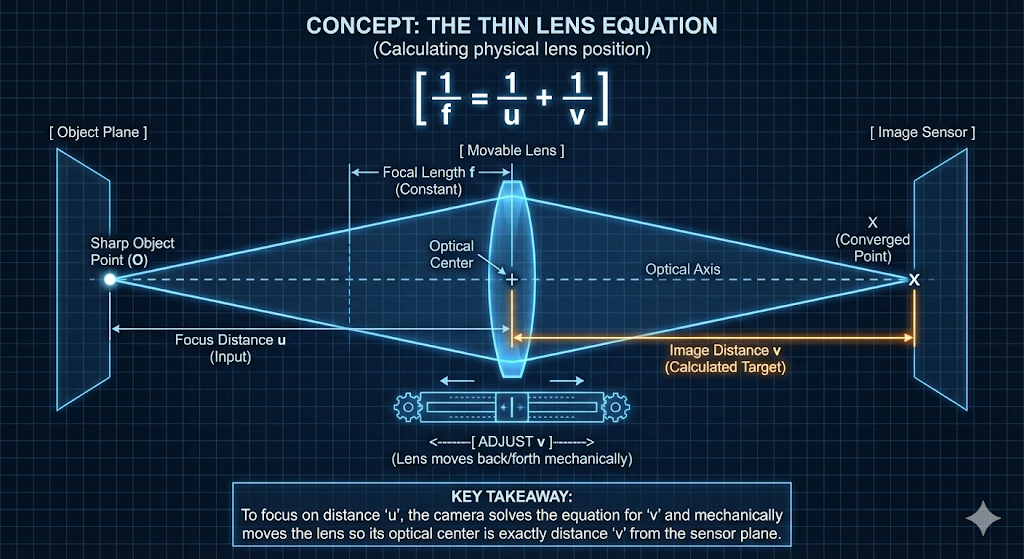
- 카메라는 얇은 렌즈 방정식(Thin Lens Equation)으로 설명되는 과정을 통해 내부 광학 장치를 조정하여 렌더링할 적절한 이미지 평면을 결정합니다:
\({1\over f} = {1\over u} + {1\over v}\)
- 여기서
- $f$는 렌즈의 초점 거리입니다.
- $u$는 초점 거리(focus distance)로, 완벽하게 초점을 맞추려는 물체 평면에서 렌즈까지의 거리입니다.
- $v$는 이미지 거리(image distance)로, 렌즈의 광학 중심에서 이미지 센서 또는 이미지 평면까지의 거리입니다.
- 이는 초점을 달성하기 위해 물리적으로 조정되는 변수입니다.
- 여기서
- 얇은 렌즈 방정식은 주어진 초점 거리($f$)에 대해 이미지 거리($v$)가 초점 거리($u$)에 의해 고유하게 결정됨을 보여줍니다.
- 따라서 특정 거리에 있는 물체에 초점을 맞추는 것은 이미지 센서에 대한 렌즈 어셈블리를 물리적으로 이동함으로써 달성됩니다.
- 이 광학 중심의 물리적 움직임은 원하는 물체 평면에서 오는 광선이 카메라 센서에 정확하게 수렴되도록 보장하여 해당 물체에 선명하게 초점을 맞춥니다.
시각 효과 구현 (Implementing Visual Effects)
디포커스 블러 (피사계 심도) (Defocus Blur (Depth of Field))
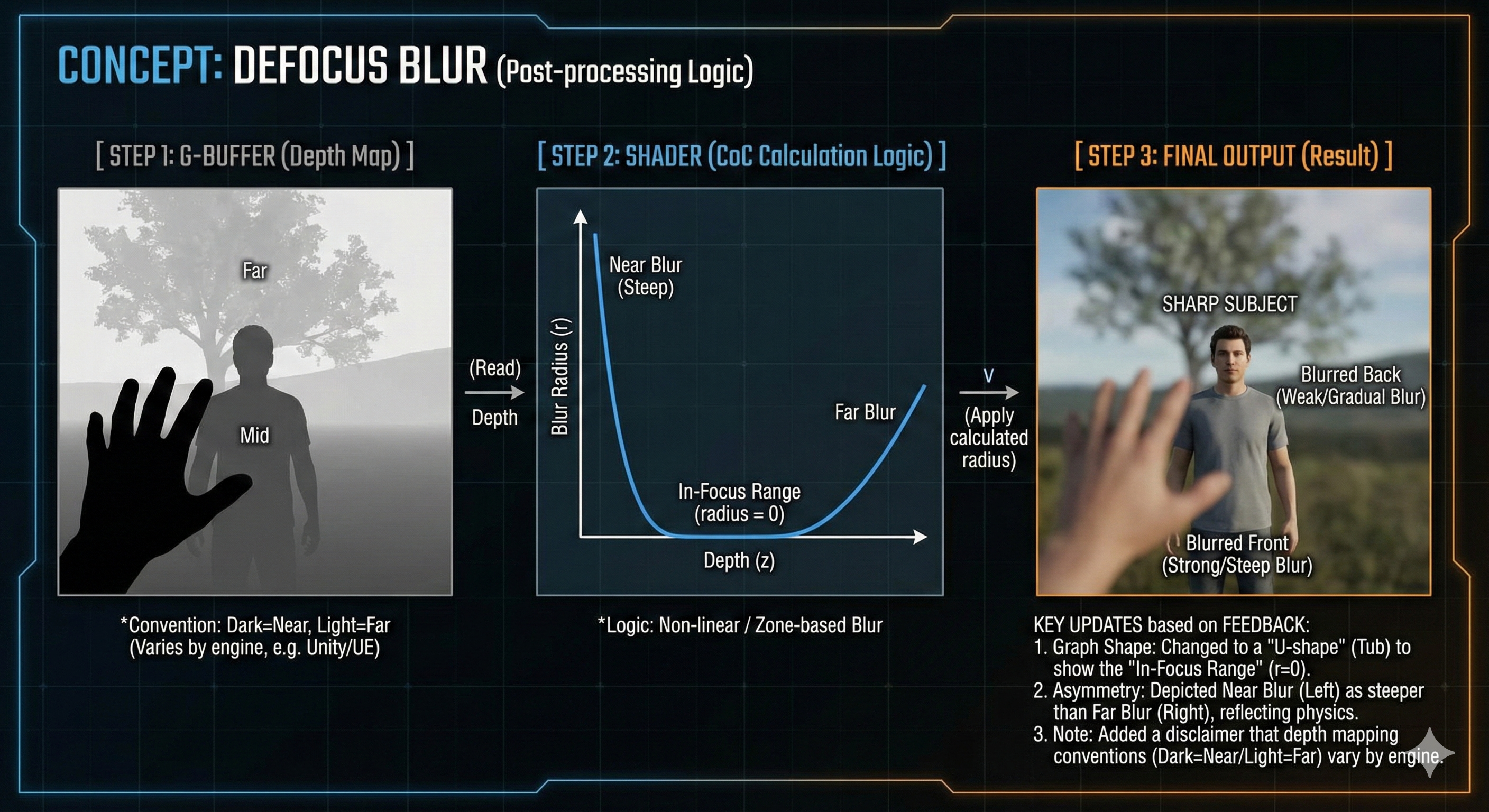
- 디포커스 블러(Defocus blur)는 일반적으로 피사계 심도(DoF)로 알려져 있으며, 물체가 카메라의 초점 범위 내에 있지 않을 때 발생하여 착란원(CoC)이 눈에 띄게 커지는 현상입니다.
- 실시간 렌더링에서 이 물리적 프로세스를 시뮬레이션하는 것은 계산 비용이 많이 듭니다.
- 따라서 일반적인 대안은 G-버퍼(G-Buffer)를 사용하는 후처리 기법입니다.
- G-버퍼는 깊이, 위치 및 표면 법선을 포함하여 픽셀당 데이터를 저장합니다.
- 그런 다음 후처리 셰이더는 이 깊이 정보를 사용하여 픽셀이 카메라의 초점면에서 떨어진 거리를 기반으로 각 픽셀에 대한 블러 반경을 계산합니다.
- 픽셀의 깊이가 DoF 경계 내에 있으면,
- 해당 착란원(CoC) 반경은 0으로 설정됩니다(흐림 없음).
- 픽셀의 깊이가 경계 밖에 있으면,
- 셰이더는 블러 반경을 계산합니다.
- 이 반경은 픽셀의 깊이가 초점 내 경계에서 얼마나 멀리 떨어져 있는지에 따라 배율이 조정됩니다.
- 픽셀이 초점면에서 멀어질수록 계산된 블러 반경이 더 커집니다.
- 픽셀의 깊이가 DoF 경계 내에 있으면,
- 그런 다음 후처리 셰이더는 이 깊이 정보를 사용하여 픽셀이 카메라의 초점면에서 떨어진 거리를 기반으로 각 픽셀에 대한 블러 반경을 계산합니다.
-
DoF 내의 픽셀은 거의 또는 전혀 흐림이 적용되지 않는 반면, 그 밖의 픽셀은 초점면에서의 거리에 따라 흐려져 디포커스 효과를 시뮬레이션합니다.
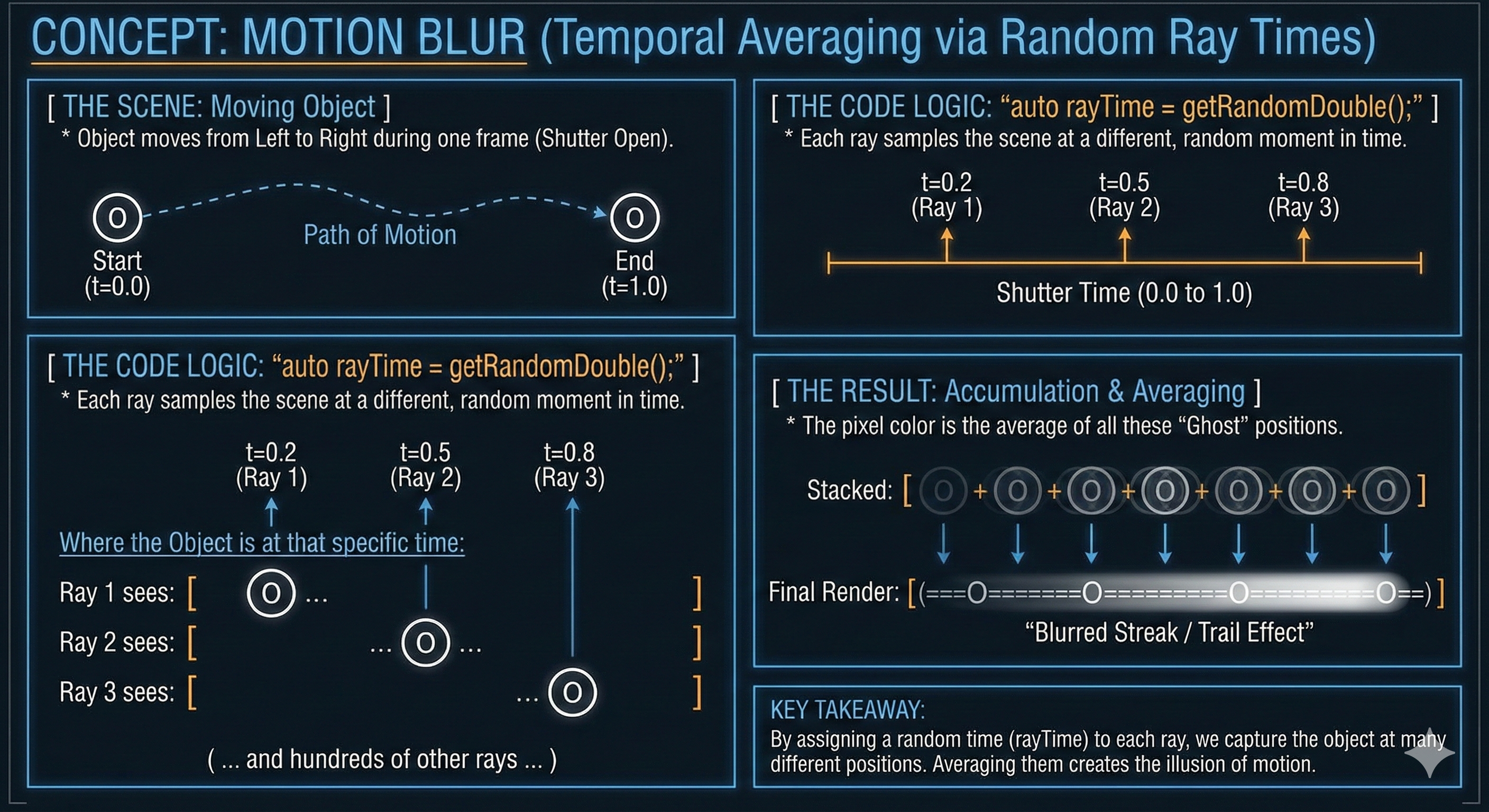
모션 블러 (Motion Blur)
- 모션 블러(Motion blur)는 짧은 노출 시간의 결과로 움직이는 물체의 번짐을 시뮬레이션하는 효과입니다.
- 이는 디포커스 블러가 공간 영역에 걸쳐 샘플을 평균화하여 달성되는 것과 유사하게, 여러 프레임 또는 시간 단계에 걸쳐 픽셀의 색상을 평균화하여 구현됩니다.
-
픽셀의 최종 색상은 시간의 다른 순간에서의 색상의 혼합이며, 움직임의 착시를 만듭니다.
-
Click to see the code
Ray getRayToSample(int currentWidth, int currentHeight) const { auto offset = getSampleSquare(); auto pixelSample = pixelCenterTopLeft + ((currentWidth + offset.getX()) * pixelDeltaWidth) + ((currentHeight + offset.getY()) * pixelDeltaHeight); auto rayOrigin = (defocusAngle <= 0) ? center : getDefocusRandomPoint(); auto rayDirection = pixelSample - rayOrigin; auto rayTime = getRandomDouble(); return Ray(rayOrigin, rayDirection, rayTime); }
기본 요소 교차: 장면 탐색의 비용 (Primitive Intersection: The Cost of Scene Traversal)
- 카메라가 광선을 생성한 후, 가장 중요한 작업은 그 광선이 장면의 기하학적 기본 요소와 교차하는 위치와 여부를 결정하는 것입니다.
- 구(sphere)나 삼각형과 같은 단순한 모양은 교차 테스트가 간단하지만, 사각형(quadrilateral)과 같은 복잡한 기본 요소는 다단계 해석 기하학을 요구합니다.
- 사각형(quad) 교차는 견고한 기하학적 처리를 보장하기 위해 광선-평면 테스트와 후속 경계 검사를 결합하는 2단계 프로세스를 필요로 합니다.
사각형 정의 (Quad Definition)
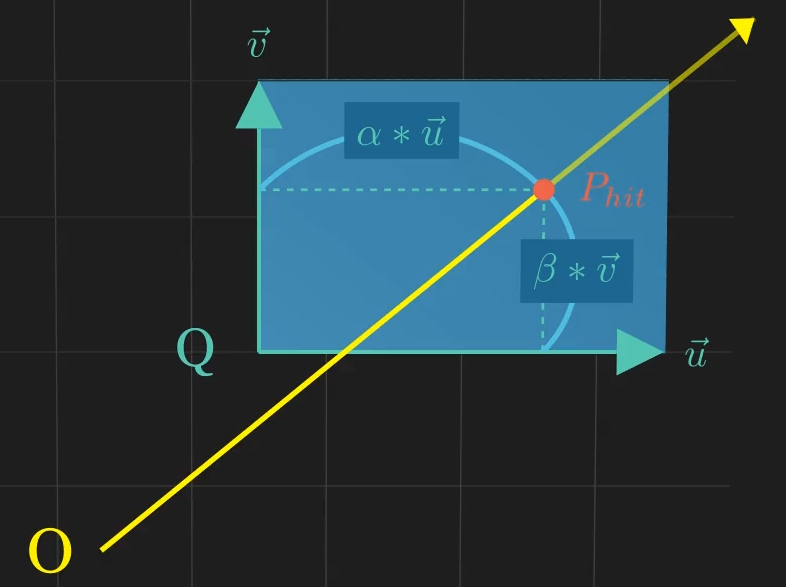
- 사각형은 시작점 $\mathbf{Q}$와 두 방향 벡터 $\vec{u}$ 및 $\vec{v}$에 의해 매개변수적으로 정의됩니다. 무한 평면 상의 임의의 점 $\mathbf{P}(i, j)$는 다음과 같습니다:
- 사각형 자체는 $\mathbf{0 \le i \le 1}$ 및 $\mathbf{0 \le j \le 1}$로 제한된 영역입니다.
2단계 교차 논리 (The Two-Step Intersection Logic)
- 광선-평면 교차 (시간 $t$): 광선 및 평면 방정식을 $t$에 대해 풀어 사각형을 포함하는 무한 평면 상의 교차점 $\mathbf{P_{hit}}$을 찾습니다.
- 점 포함 검사 (매개변수 $\alpha, \beta$): 매개변수 $\alpha$와 $\beta$를 계산하고 이들이 0과 1 사이에 있는지 확인하여 교차점 $\mathbf{P_{hit}}$이 사각형의 정의된 경계 내에 있는지 확인합니다.
-
성공 조건: 광선이 사각형을 맞추는 경우는 $\mathbf{t \ge 0}$ 및 $\mathbf{0 \le \alpha \le 1}$ 및 $\mathbf{0 \le \beta \le 1}$일 때입니다.
안티앨리어싱 (Anti-Aliasing)
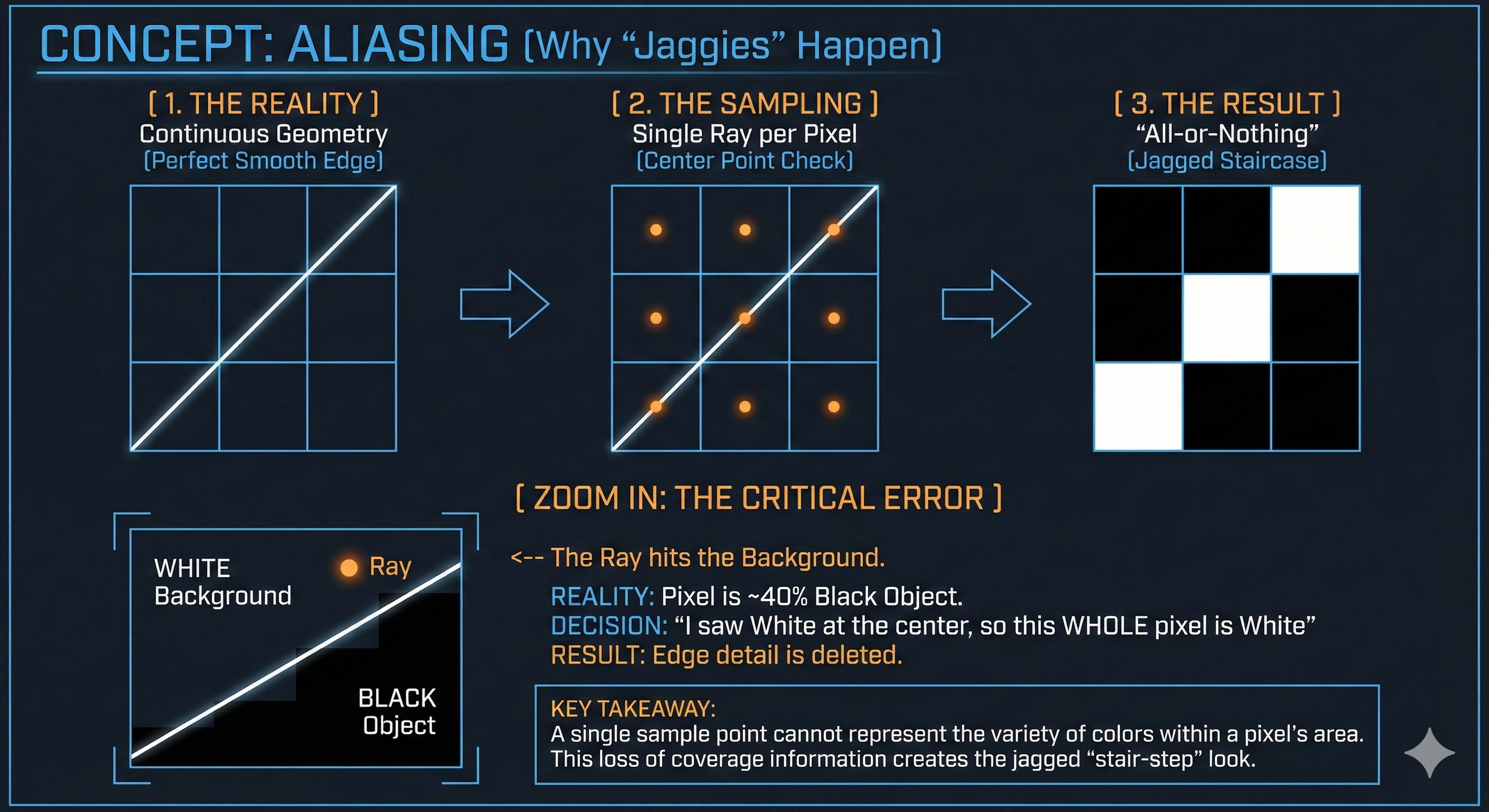
- 앨리어싱은 컴퓨터 그래픽스에서 날카로운 모서리와 선이 들쭉날쭉하거나 “계단 모양(stair-stepped)“으로 보이는 일반적인 시각적 문제입니다.
- 이는 연속적이고 부드러운 3D 장면이 화면의 이산적인 픽셀 격자에 투영되기 때문에 발생합니다.
- 각 픽셀은 단일하고 단단한 색상만 표시할 수 있습니다. 이 문제의 핵심 원인은 점 샘플링(point sampling)이라는 프로세스입니다.
앨리어싱이 발생하는 이유 (Why Aliasing Occurs)
- 레이 트레이싱에서 픽셀의 색상은 전통적으로 카메라에서 픽셀의 중심을 통과하여 장면으로 단일 광선을 발사하여 결정됩니다.
- 광선이 맞춘 물체의 색상이 전체 픽셀에 사용됩니다.
- 문제는 단일 픽셀이 단일 점이 아니라 장면의 작은 정사각형 영역을 나타낸다는 것입니다.
- 예를 들어, 검은색 물체가 흰색 배경과 만나는 날카로운 모서리가 해당 픽셀 영역 내에 있으면, 중앙으로 발사된 단일 광선은 흰색 배경만 맞출 수 있습니다.
- 모서리의 검은색 부분은 완전히 놓치게 됩니다.
- 이 “전부 아니면 전무(all-or-nothing)” 접근 방식은 세부 정보 손실로 이어져 들쭉날쭉한 계단 모양을 유발합니다.
- 픽셀의 색상은 단일 샘플로 결정되지만, 픽셀이 나타내는 영역은 장면에 여러 색상을 포함할 수 있습니다.
해결 방법 (How to Fix)
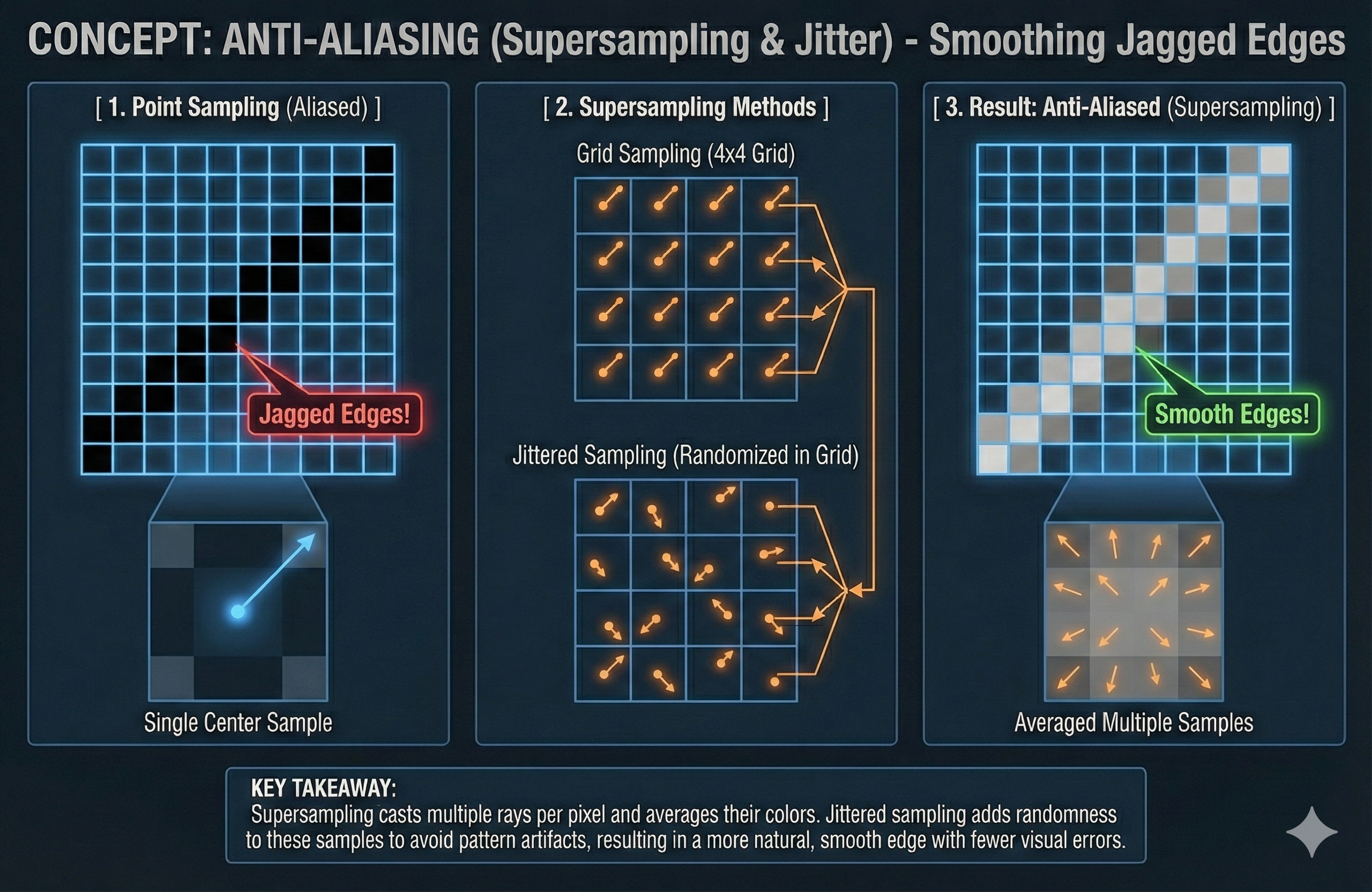
- 해결책은 각 픽셀에 대해 단 하나의 광선 대신 여러 개의 광선을 발사하는 슈퍼샘플링(supersampling)을 사용하는 것입니다.
- 핵심 아이디어는 픽셀 영역 내의 다른 위치를 샘플링한 다음, 결과 색상을 평균화하여 실제 색상을 더 정확하게 표현하는 것입니다.
- 이 색상 혼합은 물체 간의 전환을 부드럽게 하여 들쭉날쭉한 모서리를 제거합니다.
- 슈퍼샘플링 방법은 각 픽셀 내에서 여러 샘플 위치를 선택하는 방식이 다릅니다:
- 격자 샘플링 (Grid Sampling)
- 픽셀은 규칙적인 격자(예: 2x2, 4x4)로 나뉘며, 각 서브 격자 셀의 중앙으로 광선이 발사됩니다.
- 4x4 격자의 경우,
- 16개의 광선이 발사되고
- 이들의 평균 색상 값이 해당 셀의 색상 값이 됩니다.
- 4x4 격자의 경우,
- 이 방법은 간단하고 효과적이지만, 때로는 미세한 세부 사항을 놓치거나, 샘플링 격자가 장면의 반복 패턴과 정렬되면 자체적인 시각적 아티팩트를 생성할 수 있습니다.
- 픽셀은 규칙적인 격자(예: 2x2, 4x4)로 나뉘며, 각 서브 격자 셀의 중앙으로 광선이 발사됩니다.
- 지터드 샘플링 (Jittered Sampling):
- 이는 더 진보된 기술입니다.
- 이 역시 픽셀을 격자로 나누지만, 각 셀의 중앙으로 광선을 발사하는 대신, 각 셀 내의 무작위로 선택된 지점으로 광선을 발사합니다.
- 이 작은 무작위성은 샘플이 픽셀 영역 전체에 고르게 분포되도록 보장하면서도, 격자 샘플링의 구조화된 아티팩트를 방지하는 데 도움이 됩니다.
- 지터드 샘플링은 눈에 띄는 아티팩트가 적은 더 자연스럽고 정확한 결과를 생성합니다.
- 이는 더 진보된 기술입니다.
- 격자 샘플링 (Grid Sampling)
후처리 및 최종 디스플레이 (Post-Processing & Final Display)
- 렌더링 파이프라인의 최종 단계에는 선형 공간에서 계산된 빛 강도 값을 포함하는 고동적 범위(HDR) 이미지 데이터를 처리하고, 이를 표준 디스플레이에 적합한 지각적으로 올바른 저동적 범위(LDR) 이미지로 변환하는 과정이 포함됩니다.
톤 매핑: 동적 범위 압축 (Tonemapping: Compressing the Dynamic Range)
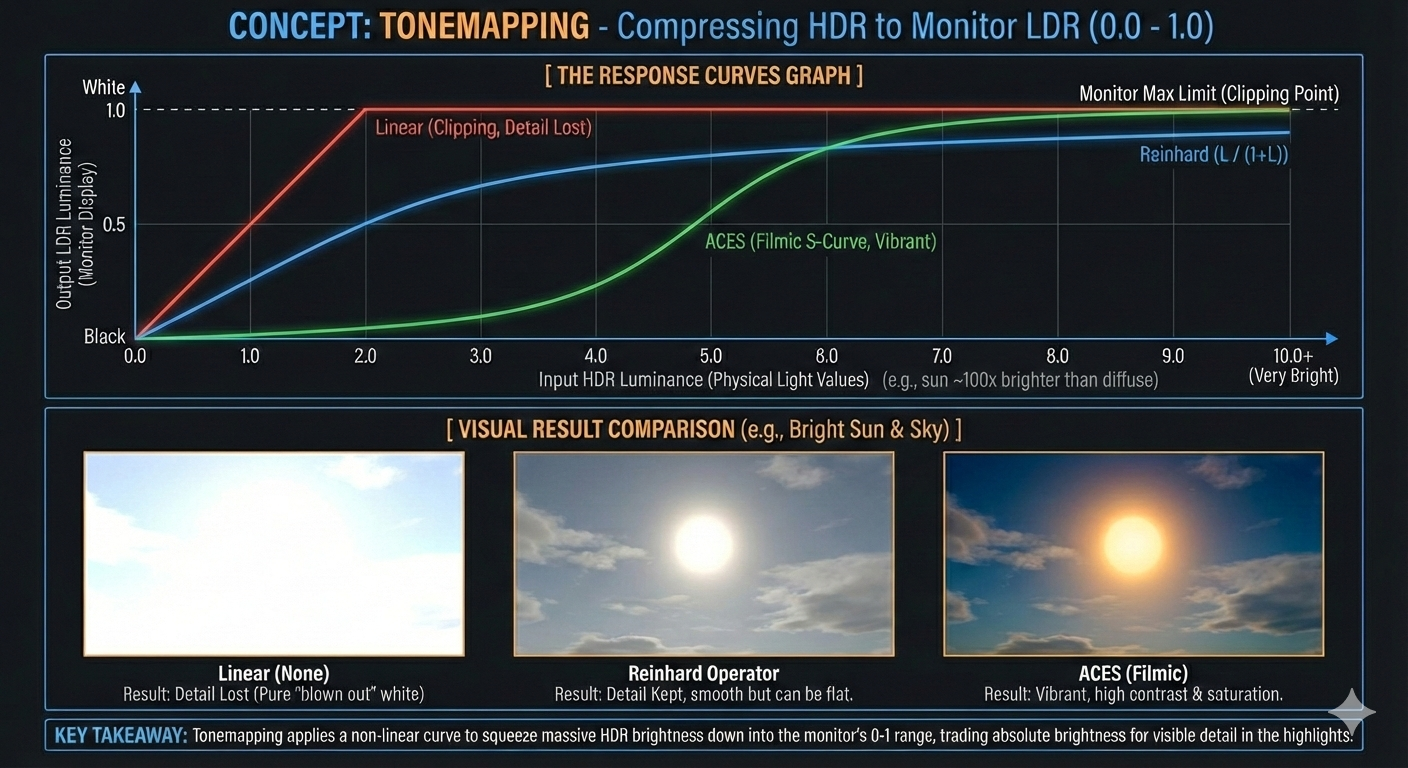
- 톤 매핑(Tonemapping)은 렌더링된 HDR 이미지의 넓은 범위의 휘도(밝기) 값을 표준 모니터가 표시할 수 있는 좁은 범위로 매핑하는 매우 중요한 프로세스입니다.
- 문제: 물리 기반 렌더링은 빛을 정확하게 계산하며, 종종 표준 LDR 이미지 파일(예: 8비트 JPEG)의 $0$에서 $1$ 범위를 초과하는 매우 밝은 값(예: 직사광선)을 초래합니다.
- 조정 없이 이 값을 표시하면 하이라이트가 클리핑되어 디테일 손실이 발생합니다.
- 해결책: 톤 매핑 오퍼레이터는 비선형 곡선을 적용하여 이미지의 밝은 부분을 압축하는 동시에 중간 톤과 그림자의 디테일을 보존합니다.
- 널리 사용되는 두 가지 오퍼레이터는 다음과 같습니다:
- 라인하르트 오퍼레이터(Reinhard Operator): 사진 노출 과정을 모델링하는 간단하고 계산 비용이 저렴한 오퍼레이터입니다.
- 하이라이트를 부드럽게 압축하지만 때로는 다소 평평하거나 색이 바랜(washed-out) 모양을 초래할 수 있습니다.
- 여기서 $L_{in}$은 선형 입력 휘도이고 $L_{out}$은 결과 LDR 휘도입니다.
- ACES (Academy Color Encoding System): 특히 하이라이트에서 생생한 모양과 뛰어난 색상 채도 보존으로 알려진 보다 정교한 필름 룩(filmic) 톤 매핑 표준입니다.
- 이는 시네마틱 색상 과학에서 파생된 복잡한 곡선을 사용하여 시각적으로 고품질 필름 스톡과 유사한 결과를 생성합니다.
- 라인하르트 오퍼레이터(Reinhard Operator): 사진 노출 과정을 모델링하는 간단하고 계산 비용이 저렴한 오퍼레이터입니다.
색상 변환 및 룩업 테이블 (LUTs) (Color Transformation and Look-Up Tables (LUTs))
- 톤 매핑 후, 이미지는 특정 예술적 스타일을 적용하거나 색상 불균형을 수정하기 위해 색상 변환(Color Transformation)을 거칩니다. 이는 종종 룩업 테이블(Look-Up Table, LUT)을 사용하여 수행됩니다.
- 목적: LUT는 픽셀의 원래 RGB 값을 기반으로 픽셀의 색상을 빠르게 수정하는 데 사용되는 미리 계산된 데이터 세트입니다.
- 구현: LUT는 종종 $3\text{D}$ 텍스처 큐브로 구현됩니다.
- 픽셀의 원래 RGB 색상은 LUT 큐브를 샘플링하는 좌표 $(r, g, b)$ 역할을 합니다.
- 큐브의 해당 좌표에 저장된 값은 새롭고 변환된 RGB 색상입니다.
- 효율성: LUT를 통해 복잡한 색상 보정 작업(예: 대비 또는 화이트 밸런스 변경)을 적용하는 것은 픽셀당 단일 텍스처 조회 작업만 포함하므로, 모든 픽셀에 대해 긴 수학적 함수를 실행하는 것보다 훨씬 빠릅니다.

감마 보정 (디스플레이 출력) (Gamma Correction (Display Output))
- 게시물 1에서 확립된 바와 같이, 최종 톤 매핑된 LDR 이미지는 모니터로 보내기 전에 선형 공간(Linear Space)에서 감마 공간(Gamma Space, sRGB)으로 다시 변환되어야 합니다.
- 이 최종 변환은 이미지가 지각적으로 균형을 이루도록 보장하며, 디스플레이 하드웨어의 비선형 반응을 설명하여 이미지가 사람의 눈에 올바르게 보이도록 합니다.
Leave a comment