Computer Graphics: Textures
텍스처 (Textures)
- 컴퓨터 그래픽스에서 텍스처 매핑(Texture Mapping)은 기하학적 형태(Geometry)에 재질 효과를 적용하는 과정으로, 3D 객체의 사실감을 향상시키는 핵심 기술입니다.
- 이 섹션에서는 기본 텍스처 매핑 방법부터 절차적 텍스처 생성 기술인 펄린 노이즈(Perlin Noise), 그리고 깊이와 사실감을 제공하는 섀도우 매핑(Shadow Mapping)까지 포괄적으로 다룹니다.
텍스처 매핑 (Texture Mapping)
텍스처 매핑은 좌표계 의존성에 따라 크게 세 가지 방법으로 분류됩니다.
매핑 유형 (Types of Mapping)
- 상수 텍스처 (Constant Texture):
- 개념: 표면 위치나 객체 움직임에 관계없이 모든 지점에 대해 단일하고 균일한 색상 값을 반환합니다.
- 특징: 공간 좌표나 기하학적 정보에 독립적인 가장 단순한 형태입니다. (예: 단색의 빨간색 구)
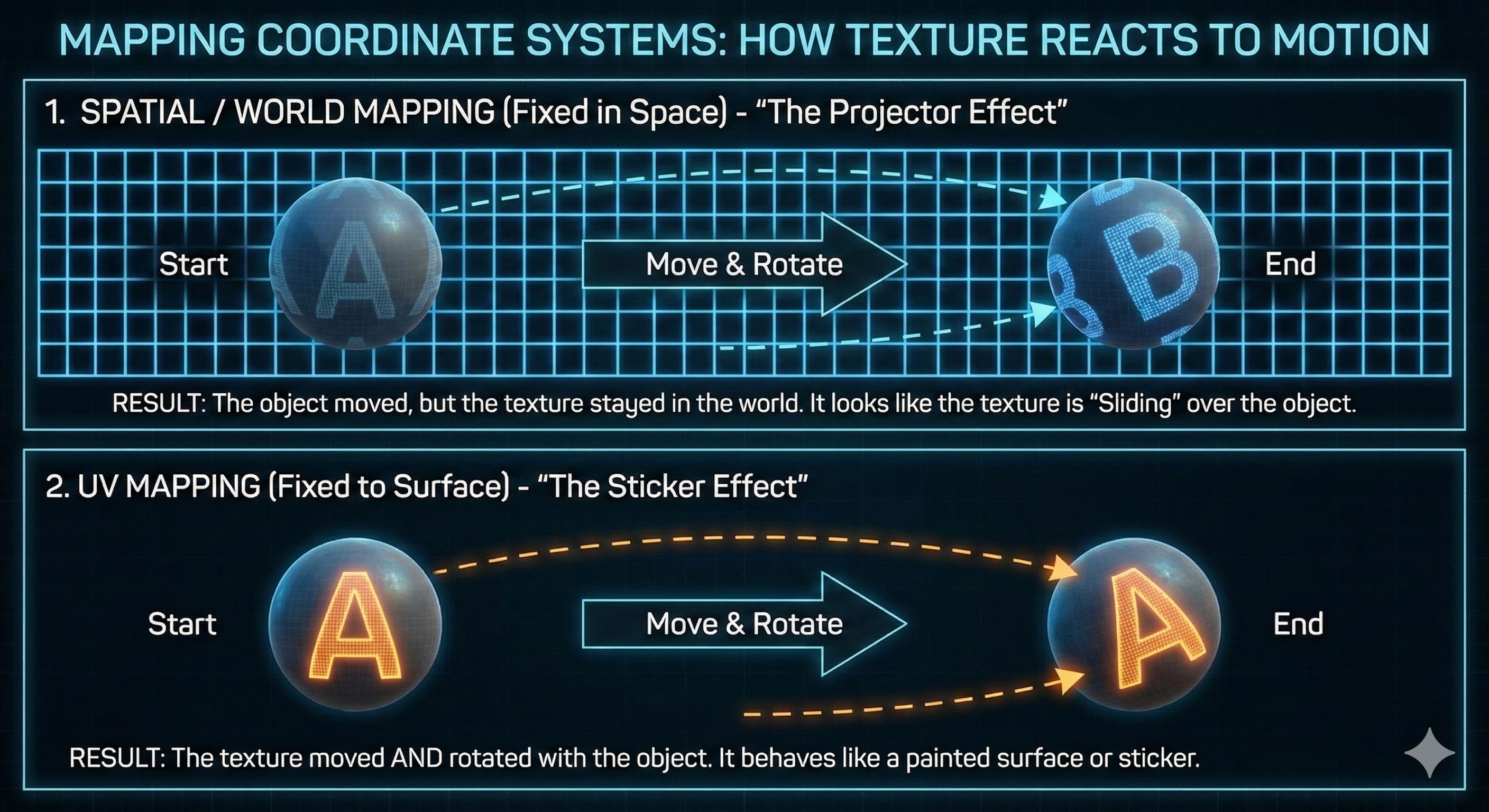
- 공간/월드 공간 텍스처 (Spatial/World Space Texture):
- 개념: 텍스처가 객체의 표면이 아닌 3D 월드 공간의 좌표를 기반으로 정의됩니다.
- 특징: 텍스처가 공간의 절대 위치에 고정되어 있으므로, 객체가 움직이거나 회전하면 텍스처가 객체와 함께 움직이는 대신 표면 위에서 미끄러지거나 왜곡됩니다. 이는 벽이 움직여도 투영된 이미지가 벽에 고정되어 있는 것과 유사합니다.
- UV-매핑 텍스처 (UV-Mapped Texture):
- 개념: 가장 일반적인 3D 텍스처링 방법입니다. 2D 좌표계 ($U, V$)를 사용하여 객체의 기하학적 표면과 텍스처 이미지를 명시적으로 연결합니다.
- 특징: 각 정점에 고유한 $(u, v)$ 좌표가 할당되어 텍스처가 표면에 “붙어” 이동하거나 회전할 때 객체와 함께 움직이며 고유한 모양을 유지하도록 보장합니다. (예: 티셔츠 위의 로고)
절차적 텍스처 (Procedural Texture)
이 방법은 이미지 파일 없이 수학적 알고리즘만을 사용하여 텍스처를 생성합니다. 메모리 효율성과 해상도 제약이 없다는 장점을 제공합니다.
체커보드 텍스처 (Checkerboard Texture)
- 핵심 원리: 광선이 맞은 지점의 $x, y, z$ 좌표를 활용합니다. 각 좌표의 내림값(floor)의 합에 대해 정수 연산(Modulo 2)을 수행하여 색상을 교대로 변경합니다.
-
구현 공식: 각 좌표를 특정 상수($scale$)로 나누어 격자의 크기를 제어할 수 있습니다.
\[\text{Pattern} = \left( \left\lfloor \frac{p_x}{scale} \right\rfloor + \left\lfloor \frac{p_y}{scale} \right\rfloor + \left\lfloor \frac{p_z}{scale} \right\rfloor \right) \bmod 2\]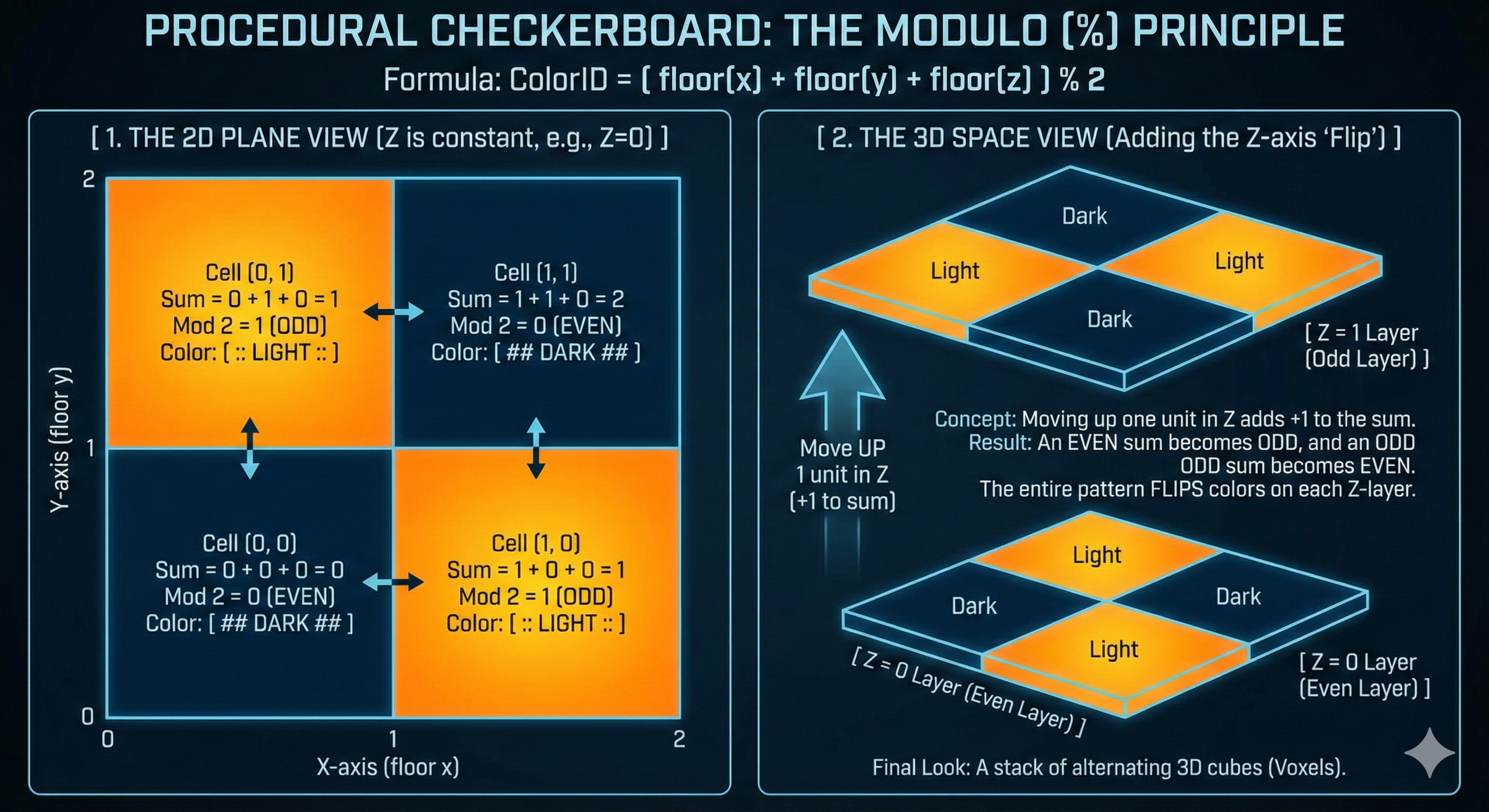
펄린 노이즈 상세 분석 (Detailed Analysis of Perlin Noise)
- 펄린 노이즈 (Perlin Noise)는 결정론적 무작위 값(Deterministic Random Values)을 생성하는 절차적 텍스처 알고리즘으로, 무작위성을 보이는 부드럽고 연속적인 패턴을 만듭니다.
- 주로 구름, 불, 지형과 같은 자연 현상의 유기적인 불규칙성을 시뮬레이션하는 데 사용됩니다.
핵심 개념 및 특징 (Core Concepts and Features)
- 정의: 결정론적 무작위 값을 생성하여 동일한 입력 좌표($x, y, z$)에 대해 동일한 출력을 보장합니다.
- 특성: 입력 위치가 변경됨에 따라 출력 값이 매우 부드럽고 유기적으로 변화합니다.
- 패턴 크기: 사용자가 정의한 순열 테이블(Permutation Table, P-Table)의 크기가 노이즈 패턴의 반복 주기를 결정합니다. 예를 들어, 테이블 크기가 $2^8$이면 $0 \sim 255$ 범위에서만 고유한 무작위 값이 생성되고, 그 후에는 패턴이 반복됩니다.
- 효율성: 기본 노이즈 패턴을 포함하는 핵심 테이블은 처음에 한 번만 생성되므로, 복잡한 난수 계산을 매 프레임 수행할 필요가 없어 계산 부하가 줄어듭니다.
기본 작동 원리 (다중 무작위 적용) (Basic Operating Principle (Multiple Random Application))
펄린 노이즈는 여러 단계를 거쳐 ‘무작위성’을 적용하고 결합하여 예측 가능하면서도 복잡한 패턴을 생성합니다.
- 순열 테이블 생성: 정수 값 시퀀스(예: $0 \sim 255$)를 배열하고 요소의 순서를 무작위로 섞어 순열 테이블(P-Table)을 만듭니다. 이 테이블은 고정된 패턴을 제공합니다.
- 좌표 해싱 (절단): 입력 위치 값(예: $x$ 좌표)은 테이블 크기(예: 255)와 AND 연산 ($\& 255$)을 수행하여 유효한 테이블 인덱스로 변환(절단)됩니다.
- 무작위 값 추출 및 결합: 인덱스는 P-Table에서 무작위 값을 검색하는 데 사용됩니다. 이 과정은 각 축($x, y, z$)에 대해 수행되며, 결과로 생성된 여러 무작위 값은 결합(예: XOR 연산 사용)되어 최종 무작위 값을 얻습니다.
상세 구현 단계 (격자점 및 보간) (Detailed Implementation Steps (Grid Points and Interpolation))
펄린 노이즈의 핵심은 격자점 정보 준비와 부드러운 보간이라는 두 단계로 나뉩니다.
격자점 정보 준비 (순열 테이블 및 그래디언트) (Grid Point Information Preparation (Permutation Table & Gradient))
- 순열 테이블 (P-Table) 및 그래디언트 벡터 할당:
- P-Table 역할: 기본 노이즈 패턴을 결정하는 핵심 구조로, 일반적으로 $2^n$(예: 256) 크기의 배열을 섞어 생성됩니다.
- 그래디언트 벡터 ($G$): 입력 위치 $P$를 둘러싼 단위 정육면체의 8개 모서리(격자점) 각각에는 P-Table을 통해 무작위로 방향이 지정된 단위 벡터가 할당됩니다. 이 벡터가 그래디언트 벡터입니다.
- 영향 계산 (내적):
- 거리 벡터 ($D$): 각 격자점에서 입력 위치 $P$까지의 상대 거리 벡터가 계산됩니다.
- 내적 (Dot Product): 그래디언트 벡터 ($G$)와 거리 벡터 ($D$) 사이의 내적 ($G \cdot D$)이 계산됩니다.
- 의미: 이 내적은 해당 격자점으로부터의 예측된 그래디언트 또는 영향을 나타냅니다. 점 $P$가 특정 격자점에 가까워질수록 내적은 0에 가까워지며, 이는 보간을 위한 입력 값으로 사용됩니다.
부드러운 보간 (보간 및 평활화) (Smooth Interpolation (Interpolation & Smoothing))
- 평활화 함수 (Smoothing Function):
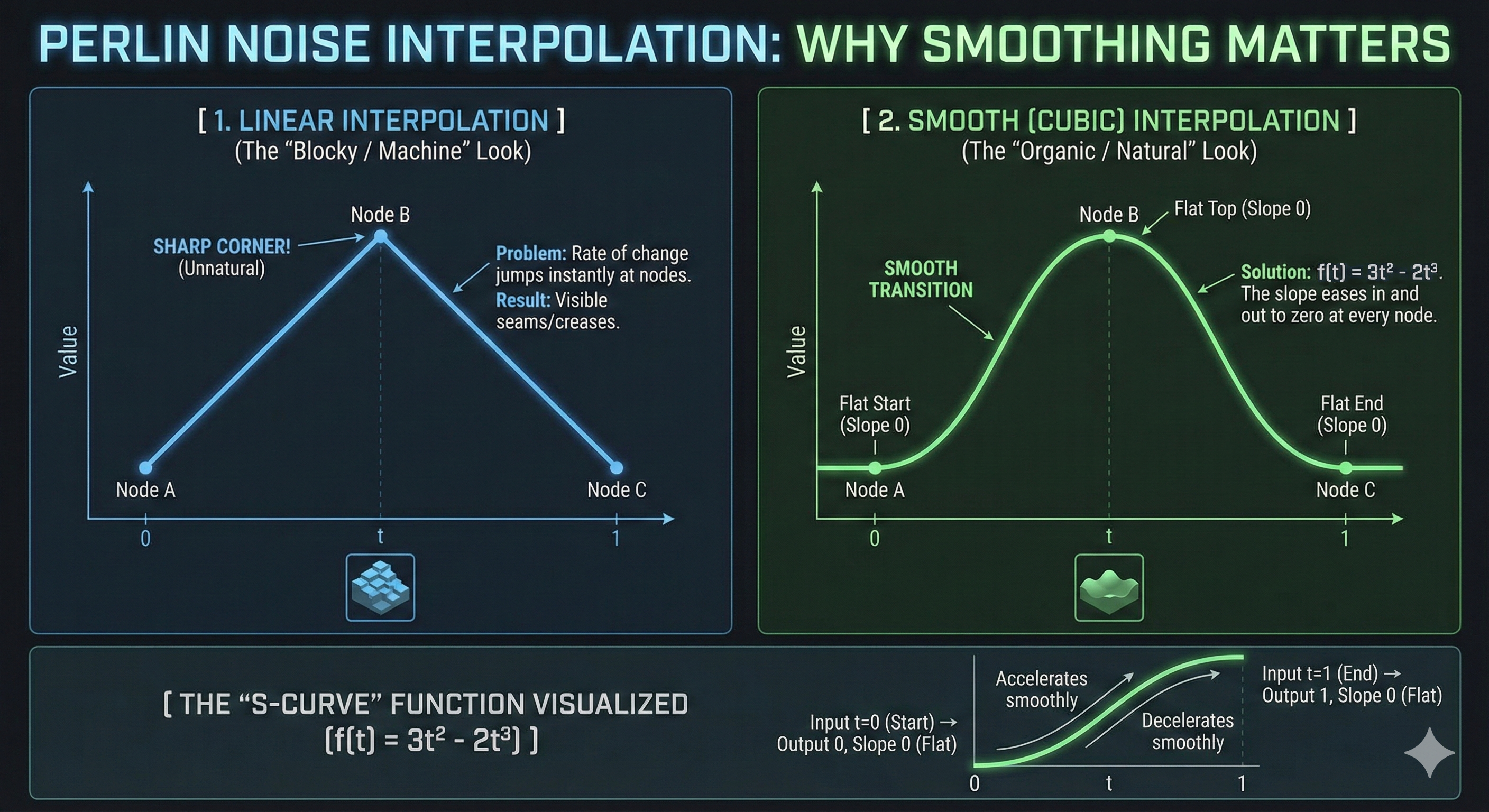
- 목적: 단순 선형 보간을 사용하면 노이즈 그래디언트가 격자 경계에서 갑자기 변하여 부자연스러운 이음새나 블록 모양을 유발합니다.
- 해결책: 입력 위치 $P$의 소수 부분($t$, 즉 $u, v, w$)에 3차 평활화 함수가 적용됩니다. 가장 일반적인 공식은 다음과 같습니다: \(f(t) = 3t^2 - 2t^3\)
- 특징: 이 함수는 $t=0$과 $t=1$에서 도함수(기울기)가 0이 되도록 보장하여, 노이즈 패턴이 격자점에서 부드럽게 연결되도록 합니다.
-
삼선형 보간 (Trilinear Interpolation): 8개의 내적 값(영향)은 평활화된 가중치($u’, v’, w’$)를 사용하여 $X \rightarrow Y \rightarrow Z$ 순서로 보간(합산)되어 최종 노이즈 값을 얻습니다. 모든 가중치의 합이 1이므로 최종 값은 가중 평균의 형태를 취합니다.
에르미트 평활화의 수학적 배경 (Mathematical Background of Hermite Smoothing)
펄린 노이즈에 사용되는 3차 평활화 함수 $f(t) = 3t^2 - 2t^3$는 3차 에르미트 스플라인(Cubic Hermite Spline)의 특수한 형태입니다.
- 에르미트 스플라인 정의: 양 끝점에서 위치 ($P_0, P_1$)와 도함수/기울기 ($M_0, M_1$)를 지정하여 제어되는 스플라인입니다.
- 평활화 함수 유도: 노이즈 평활화 함수는 일반 에르미트 스플라인 공식에 다음 조건을 설정하여 유도됩니다:
- 시작 위치 $P_0 = 0$, 끝 위치 $P_1 = 1$.
- 시작 접선 $M_0 = 0$, 끝 접선 $M_1 = 0$ (경계에서 기울기는 0으로 설정됩니다).
- 이 설정을 일반 공식에 대입하면 단순한 3차 함수 $p(t) = -2t^3 + 3t^2$ (또는 $3t^2 - 2t^3$)가 도출됩니다.
- 의미: 이 함수는 $t=0$과 $t=1$ 근처에서 변화율이 0인 이지 인/이지 아웃(Ease-in/Ease-out) 효과를 생성하여 변화의 시작과 끝을 부드럽게 만들어 자연스러운 노이즈 보간을 초래합니다.
구형 좌표 변환 (Spherical Coordinate Transformation)
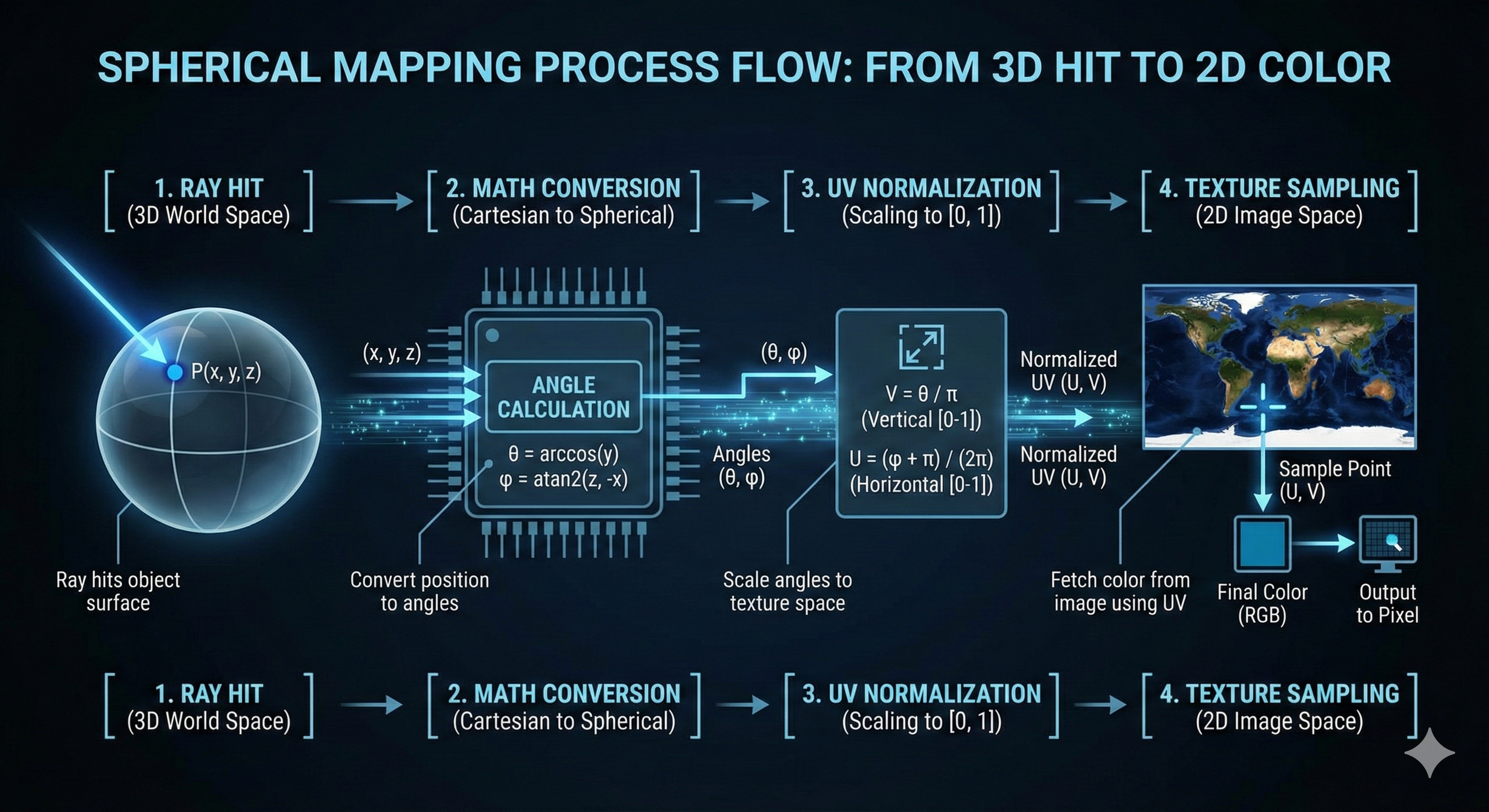
구형 좌표 변환은 3D 공간 좌표를 텍스처 이미지의 2D 좌표로 매핑하는 데 사용되는 UV 매핑의 핵심 기술입니다. 구(Sphere)와 같은 회전 대칭 객체에 환경 맵 또는 일반 텍스처를 적용하는 데 필수적입니다.
기본 개념 (Basic Concept)
- 목표: 광선이 맞은 3D 위치 ($P = (x, y, z)$)를 2D 텍스처 이미지 좌표 ($U, V$)로 변환합니다.
- 원리: 직교 좌표계 ($x, y, z$)와 구형 좌표계 ($r, \theta, \phi$) 간의 변환을 기반으로 합니다. (여기서는 객체가 단위 구 위에 있다고 가정하고 $r=1$을 사용합니다.)
- 적용: 레이 트레이싱에서 광선이 객체를 맞출 때, 맞은 지점의 ($x, y, z$) 값이 각도 정보 ($\theta, \phi$)로 변환되어 텍스처 이미지에서 해당 색상 값을 가져옵니다.
좌표계 정의 및 유도 (Coordinate System Definition and Derivation)
변환 공식을 유도하기 전에, 사용되는 좌표계를 명확하게 정의하는 것이 중요하며, 이 정의가 최종 공식의 부호를 결정합니다.
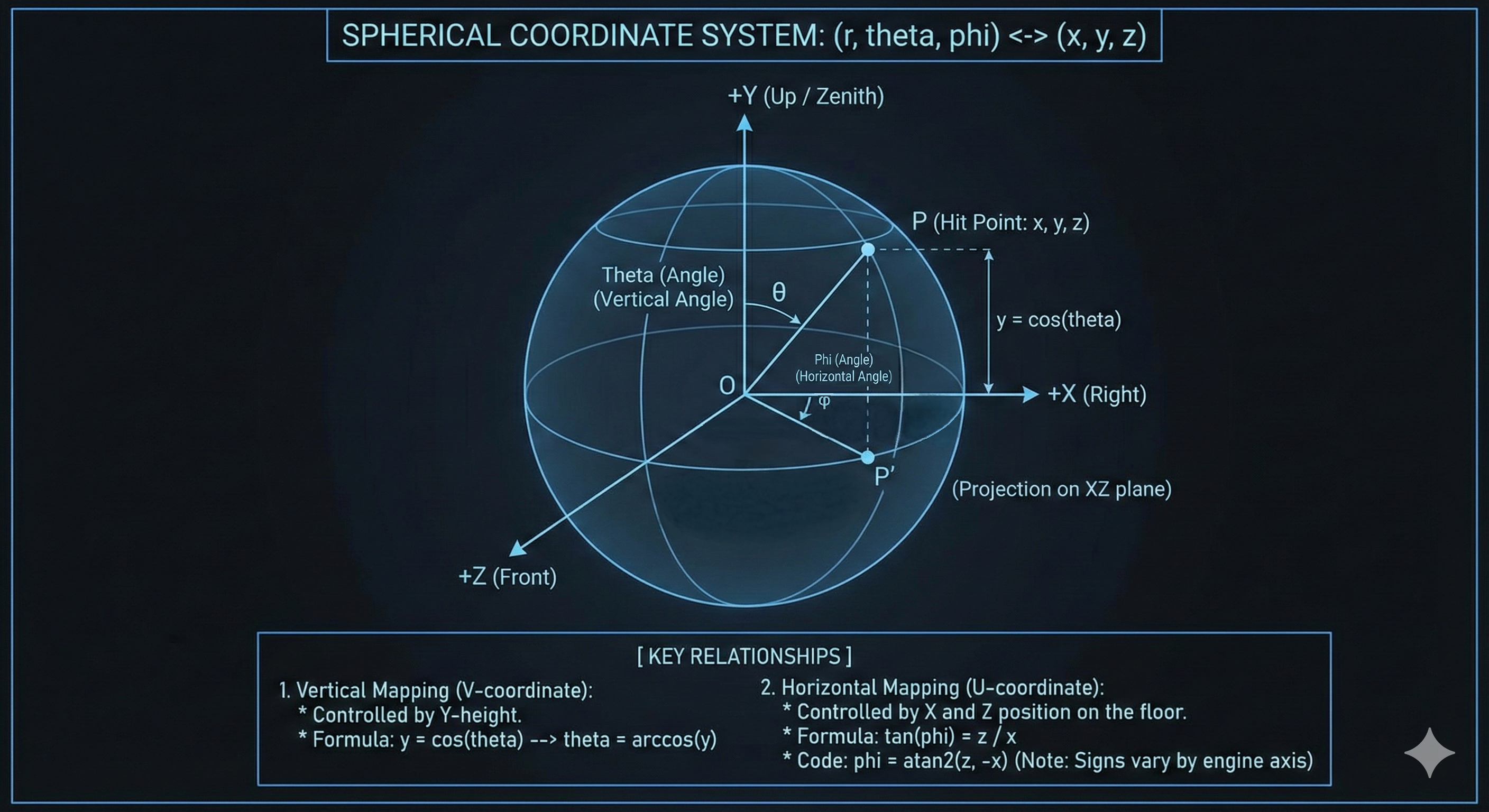
- 축 정의:
- $x$ (왼쪽/오른쪽): 오른쪽
- $y$ (위/아래): 위 (천정 방향)
- $z$ (앞/뒤): 앞
- 각도 정의:
- $\theta$ (수직 각도): $+y$ 축(위)에서 내려오는 각도 (극각, 위도)
- $\phi$ (수평 각도): $+x$ 축(오른쪽)에서 $+z$ 축(앞)을 향해 회전하는 각도 (방위각, 경도)
$x, y, z$ $\rightarrow$ $\theta, \phi$ 유도 (Derivation)
변환 공식은 일반적으로 구형 좌표($(\phi, \theta) \rightarrow (x, y, z)$)에서 직교 좌표를 얻는 과정을 역으로 하여 유도됩니다. (빗변 $r=1$ 가정)
- $\mathbf{y}$ 좌표에서 $\mathbf{\theta}$ 유도 (수직 성분):
- $y$ 값은 빗변(반지름)과 수직 각도 $\theta$를 사용하여 쉽게 찾을 수 있습니다.
- 따라서 $\theta$는 $\arccos$ 함수를 통해 얻어집니다.
- $\mathbf{x, z}$ 좌표 유도 (수평 성분):
점 $P$가 $xz$ 평면에 투영될 때, 원점과 투영된 점 사이의 거리는 $\sin\theta$입니다. 이 거리는 $x$와 $z$를 유도하는 빗변으로 사용됩니다.
-
$\mathbf{x}$ 유도:
\[\cos\phi = \frac{x}{\sin\theta} \implies x = \sin\theta \cos\phi\] -
$\mathbf{z}$ 유도:
\[\sin\phi = \frac{z}{\sin\theta} \implies z = \sin\theta \sin\phi\] -
$\phi$ 각도는 $x$와 $z$ 사이의 $\tan$ 관계를 사용하여 유도됩니다.
\[\tan\phi = \frac{\sin\phi}{\cos\phi} = \frac{z/r}{x/r} = \frac{z}{x}\] -
따라서 $\phi$는 $\operatorname{atan2}$ 함수를 사용하여 얻어집니다. $\operatorname{atan2}$는 두 변수($y, x$)를 취하고 사분면을 고려하여 올바른 각도를 반환합니다.
\[\phi = \operatorname{atan2}(z, -x)\]
-
최종 변환 공식 (Final Transformation Formulas)
- 맞은 위치 $P(x, y, z)$가 주어지면 텍스처 좌표에 해당하는 각도 $\theta$와 $\phi$는 다음과 같습니다:
-
이 각도 값들은 $V$ (수직) 및 $U$ (수평) 좌표의 범위(예: $[0, 1]$ 또는 $[0, \text{텍셀 수}]$)로 정규화되어 2D 이미지 텍스처를 샘플링하는 데 사용됩니다.
구현 고려 사항 (Implementation Considerations)
- 좌표계 일관성: 위 공식은 $+y$를 위(Up)로 정의하는 것을 기반으로 합니다. 렌더링 시스템이 $+z$를 위로 정의하거나 다른 축을 사용하는 경우, $\arccos$에 사용되는 변수와 $\operatorname{atan2}$의 변수 및 부호(예: $-x$)는 해당 관례와 일치하도록 적절하게 변경되어야 합니다.
- UV 좌표 원점: 대부분의 이미지 형식은 왼쪽 상단 모서리를 $(0, 0)$으로 정의하지만, 원점의 위치(예: 왼쪽 하단)는 특정 텍스처 또는 환경 맵의 정의에 따라 달라질 수 있습니다. 최종 텍스처 좌표를 적용하기 전에 이 원점을 확인해야 합니다.
섀도우 매핑 (Shadow Mapping)
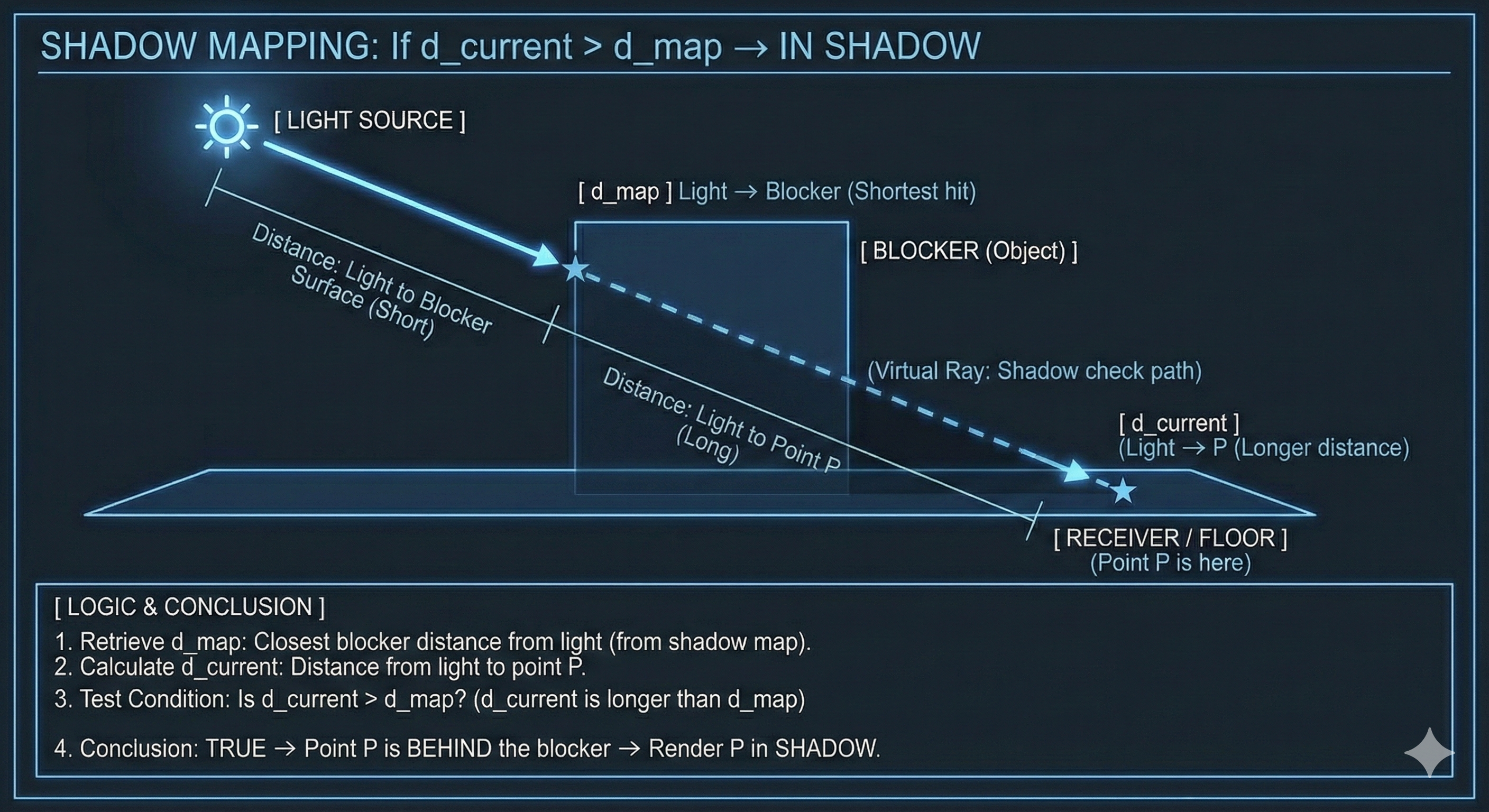
섀도우 매핑은 광원의 시점에서 깊이 정보를 활용하여 한 객체가 다른 객체를 가리는지 여부를 판단함으로써 그림자를 드리우는 기술입니다.
섀도우 매핑의 핵심 원리 (Core Principle of Shadow Mapping)
섀도우 매핑 프로세스는 두 가지 주요 단계로 구성됩니다. 핵심 개념은 깊이가 특정 방향을 기준으로 정의된다는 것입니다.
단계 1: 섀도우 맵 생성 (깊이 기록) (Stage 1: Shadow Map Generation (Depth Recording))
- 광원 시점 렌더링: 장면은 광원의 위치와 시점에서 렌더링됩니다. 이는 광원에서 모든 방향으로 섀도우 광선을 발사하는 것과 개념적으로 유사하게 작동합니다.
- 깊이 저장: 렌더링된 각 픽셀에 대해 광원에서 첫 번째 충돌(hit)까지의 가장 짧은 거리가 측정됩니다. 이 거리가 깊이(Depth)이며, 이 값들은 섀도우 맵(Shadow Map)이라는 2D 텍스처에 저장됩니다.
- 방향 정의: 섀도우 맵의 각 텍셀에 저장된 깊이 값은 광원에서 볼 때 해당 텍셀 위치에 해당하는 특정 방향에서 가장 가까운 객체까지의 거리를 나타냅니다.
단계 2: 그림자 결정 (깊이 비교) (Stage 2: Shadow Determination (Depth Comparison))
카메라 시점에서 장면을 렌더링할 때, 각 지점 $P$가 그림자 속에 있는지 여부는 다음과 같이 결정됩니다:
- 광원 공간으로 변환 (Transformation to Light Space):
- 렌더링 대상 지점 $P$의 월드 좌표는 광원의 뷰 및 투영 행렬을 사용하여 광원 공간(Light Space) 좌표로 변환됩니다.
- 개념적 의미: 이 공간 변환은 마치 광원에서 보는 것처럼 지점 $P$를 섀도우 맵의 동일한 텍셀 위치로 매핑합니다. 즉, 광원에서 발산하는 동일한 방향을 따라 놓인 모든 지점은 섀도우 맵에서 동일한 텍셀을 샘플링합니다.
- 조회: 변환된 광원 공간 좌표를 사용하여 섀도우 맵에서 저장된 깊이 값 ($d_{map}$)이 조회됩니다.
- 거리 비교 (Distance Comparison):
- 현재 깊이 계산: 지점 $P$에서 광원까지의 실제 거리 ($d_{current}$)가 계산되거나, 광원 공간 변환 결과에서 깊이 성분($z$ 값)이 추출됩니다.
- 판단:
- $\mathbf{d_{current} > d_{map}}$: 이는 현재 지점 $P$에서 광원까지의 거리가 섀도우 맵에 저장된 최소 깊이보다 크다는 것을 의미합니다. 이는 $P$와 광원 사이에 다른 객체(장애물)가 있고, 광선이 가려져서 그림자가 드리워졌음을 시사합니다.
- $\mathbf{d_{current} \approx d_{map}}$: 거리가 거의 같으면, 지점 $P$가 광원에서 가장 가까운 객체의 표면에 있음을 의미하므로 그림자가 드리워지지 않습니다.
섀도우 여드름 및 해결책 (Shadow Acne and Solution)
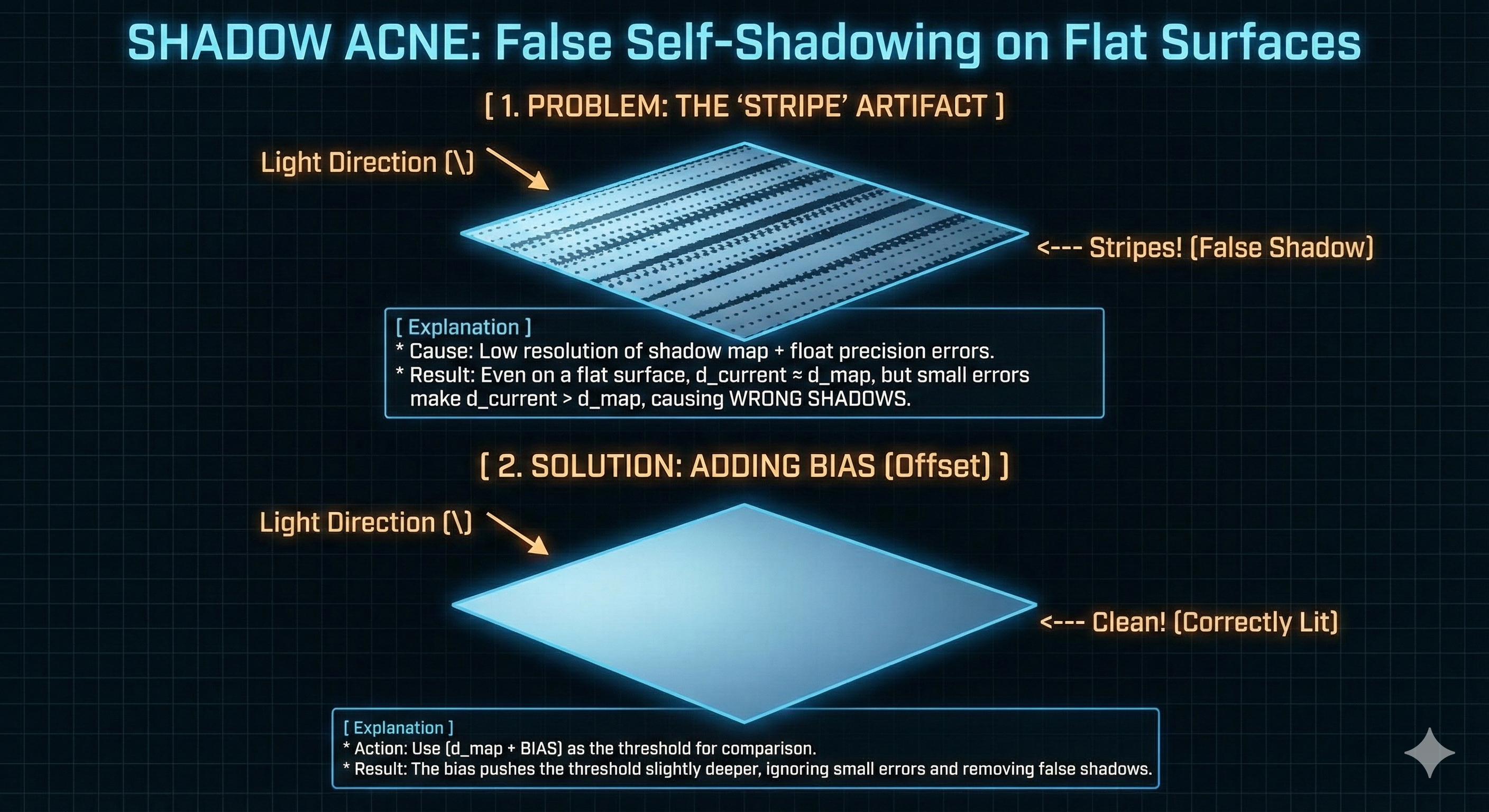
섀도우 여드름(Shadow Acne)은 부동 소수점 숫자로 섀도우 매핑을 구현할 때 발생하는 피할 수 없는 문제입니다.
- 문제 원인: 부동 소수점 산술의 정밀도 한계로 인해, 2단계에서 저장된 깊이 ($d_{map}$)와 계산된 현재 깊이 ($d_{current}$)가 정확히 일치하지 않는 약간의 불일치 오류가 발생합니다. 이 오류는 조명이 비춰져야 할 표면이 자체 가려짐으로 잘못 판단되게 하여 표면에 어두운 얼룩(여드름)이 생기게 합니다.
-
해결책 (바이어스): 이 오류를 수정하기 위해 섀도우 맵과 비교할 때 $d_{current}$에 매우 작은 양수 값인 엡실론 ($\epsilon$)을 더합니다 ($\mathbf{d_{current} + \epsilon}$). 이 오프셋은 광선의 시작점을 표면에서 약간 이동시켜 자체 교차(Self-Intersection)의 오판을 방지합니다.
Leave a comment